Autonomous Boats
Today, we’ll talk about something that is barely covered in the Autonomous Tech world…
It’s also something I’m not familiar with, so I’ll just be able to talk about it. Technology has enabled us to build self-driving cars, but actually, the most impactful changes will be around flying cars, and sea navigation.
This article is based on an email I wrote to my mailing list — The original email is called “Startup Idea — Autonomous Boats”; it’s a concept where I explore the necessary steps we’ll need to build a startup around a specific topic.
📩So if you don’t want to miss another article, I invite you to join the mailing list to receive daily knowledge, tips, stories on AI, Computer Vision, and Autonomous Vehicles!
Today, let’s take a look at Autonomous Boats.
How to start?
If we’re to build a startup, you must solve a problem that is Difficult, Urgent, and Recognized. After searching on Google, I found out that the biggest problem around boats is collisions.
Does that surprise you?
Over 90% of the world’s trade is carried by sea, the whole world is relying on the oceans, and the country which is the most concerned is the US. The U.S. economy is accounting for more than $352 billion in GDP and 3.1 million jobs, according to the NationalOceanic and Atmospheric Administration (NOAA).
The biggest risk of collisions is at the port, or in crowded places.
Here is what happened between 2011 and 2016, in Europe only.
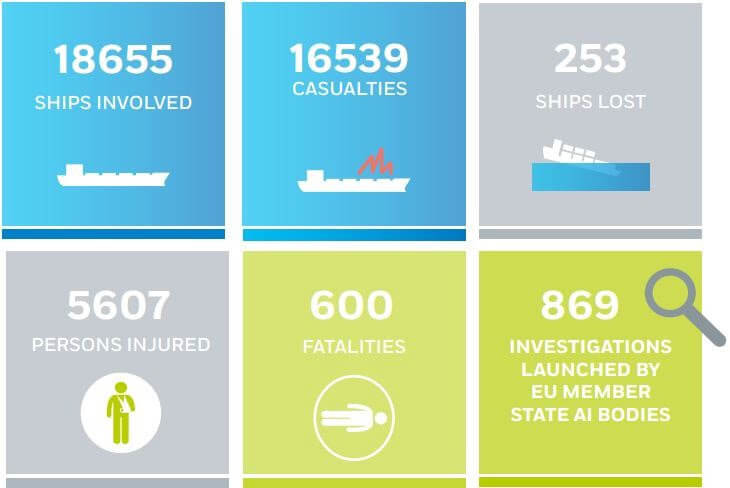
I took this picture in a report from EMEA, just take a minute to read it here .
It’s full of fascinating facts.
Now, let’s see more precisely what we’re talking about.

Today’s article is about solving this particular problem.
This problem costs millions (in reparations, and lost cargo) and continues to happen, that is growing with the number of boats. It’s also a problem we all acknowledged watching TITANIC sink.
It’s time we solve it.

Autonomous Boats
Avoiding an accident when you’re driving a car is easy, you just turn the wheel a bit. Avoiding a cargo accident is much harder. Although I’ve never been in a cargo accident, my father has his boat license and I know how hard it is to maneuver in emergency situations.
Definition
So, how do we make boats autonomous? To be able to understand this, we must first define what“autonomous” means.
In self-driving vehicles, autonomy is measured by concrete facts.
In my self-driving car course , I describe the 5 levels of autonomy and how to target your market by selecting one of these levels.
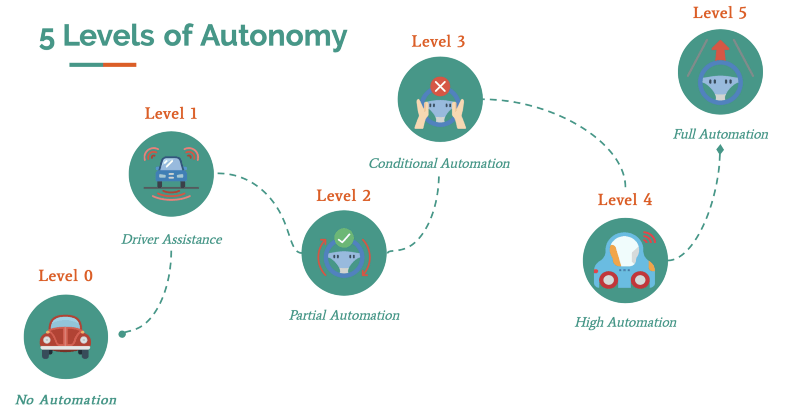
In a self-driving car, autonomy is easily measured using the driver’s involvement, and the range of use-cases covered. In autonomous boats, we only measure autonomy using 3 criterias:
No Autonomy — The current situation
Half Autonomy — Autonomous with a crew on board.
Full Autonomy — Autonomous, no crew on board.
I won’t talk about the remote-controlled boats, I wouldn’t know what to do with them.
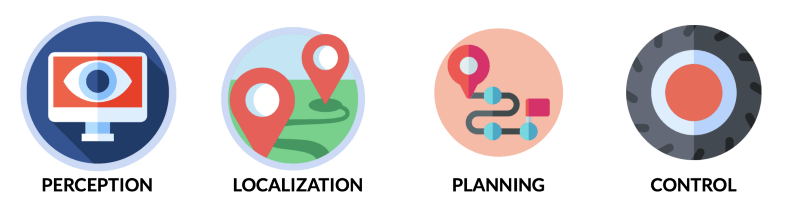
Autonomy is either on or off; the only criteria we’re using is the presence or absence of the crew. In most of my emails and articles, I’m telling you about the 4 pillars that make vehicles autonomous. It really applies everywhere, even in boats.
Let’s review how these 4 pillars work in autonomous boats.
Perception in Autonomous Boats
Perception is the ability to detect other ships, estimate their velocities, orientations, and types.
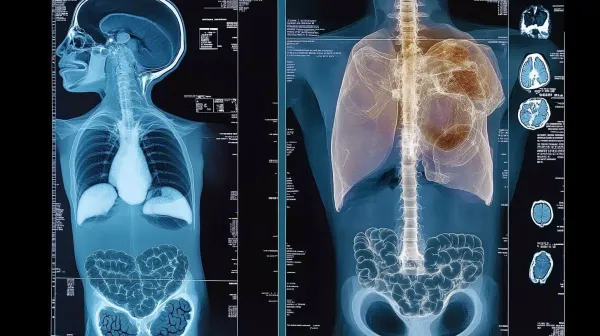
I was surprised, but the Perception system is very similar to what’s happening in autonomous vehicles. Cameras, LiDARs, and RADARs are the main sensors. They use Computer Vision, Deep Learning, and Sensor Fusion to detect obstacles. Here is a picture of the perception system from Neptec Technologies. Looks familiar?
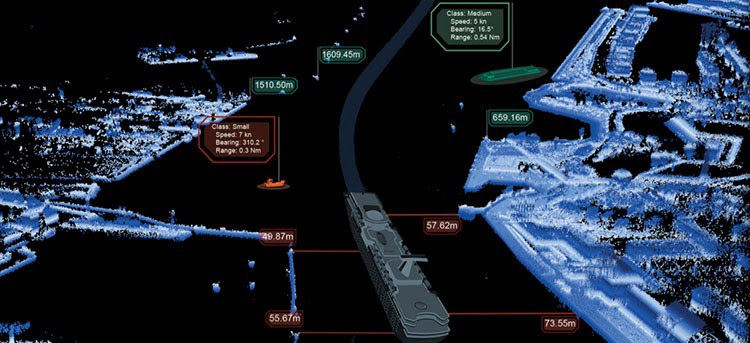
The only difference is the range.
Self-Driving car sensors cover a 200–300m range. Here, you can clearly see the boat detecting obstacles at over 1.5 km. The reason is that equipment in boats is heavier and larger than in cars. Boats have also use long-range RADARs for decades and have that “range” skill.
Here is a picture of a vision system from ORCA-AI , an Israeli autonomous boat company.

The work they do is impressive, have a look at that night vision.
We can detect several classes, use Sensor Fusion to be very accurate, and night vision to make it work in every situation.
Perception is very similar to what we have in autonomous vehicles. The sensors can be a bit different, but in the end we’re full of Machine Learning, Deep Learning, and Sensor Fusion.
Localization in Autonomous Boats
Localization is the ability to localize precisely in the ocean and world.
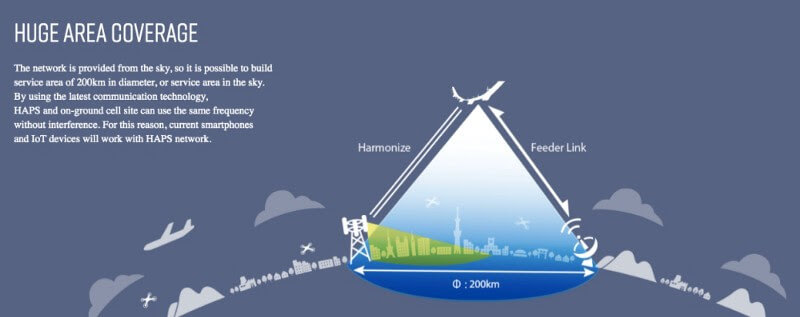
Unlike self-driving cars, I doubt that it had a centimeter-level accuracy. One thing you should know: the maritime transportation field has its own satellite and navigation system. It means they have beacons in the sea that emit, and you can localize using this. This is exactly how GPS works, and boats are equipped with it.
AUV (Autonomous Unmanned Vehicles) also use a lot of different sensors. In self-driving cars, IMUs are used to know how many meters we drove. In boats, we have similar concepts.
One sensor that is particularly used in Autonomous Boats is the SONAR.
SONARs are acoustic sensors that send sound pulses underwater and measure the time it takes to reflect. One potential use is the measurement of sandbanks and the detection of animals.
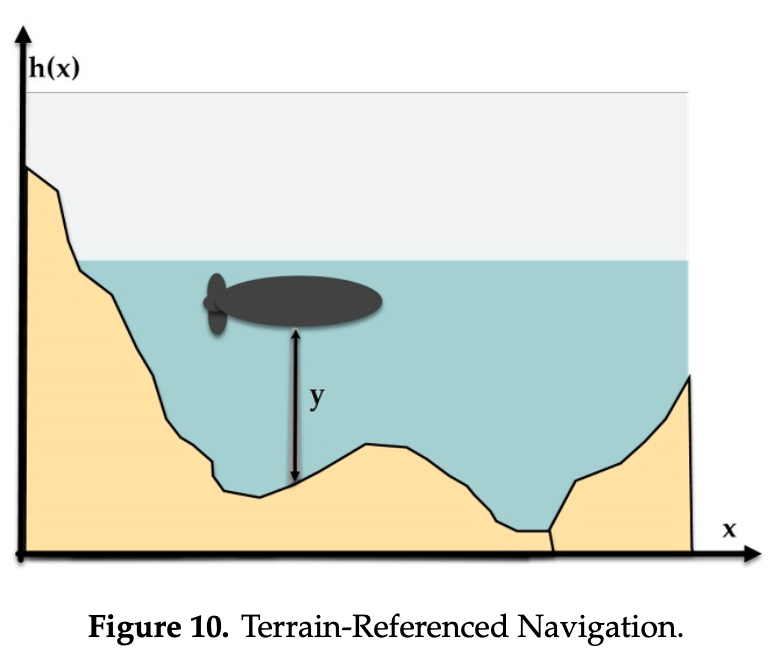
There is a lot to cover in localization.
It’s a hard topic, full of SLAM (Simultaneous Localization And Mapping) and other difficulties. It’s much harder for submarines than for boats because there is a notion of depth and some sandbanks can be blocking the signal.
Let’s take a look at planning.
Navigation/Planning in Autonomous Boats
Navigation is planning a sailing route from one dock to another.
It’s very similar to what we have in self-driving vehicles: the goal is to create 3D Waypoints and to follow them.
Subtilities —
The law is different, we don’t have roads, and we don’t have traffic signs or light. It means we must rethink the navigation system to consider areas (coast, deep sea, …) and places where we’re allowed to be. Other than this, the sea is almost infinite and we are entirely free once there.
To avoid collisions (as this is our main goal), we’ll however need to be mindful of our surroundings. We’ll need to know where the other boats are, and we’ll need to learn how to avoid these.

If we pause on this picture from ORCA AI, how can we deal with this?
We must use Perception and Localization very carefully to be sure not to run into these things. These things can also drift with the water current. It means our planning system must be able to predict other vehicles’ drifts. We can do that using Kalman Filters.
Control in Autonomous Boats
Control is different from self-driving cars: we have no steering wheel, and no pedals. But we still need to steer and to accelerate.
In autonomous boats, there is no notion of braking; we simply stop accelerating.
One thing we must take into account is the notion of drift.
Here is an example.
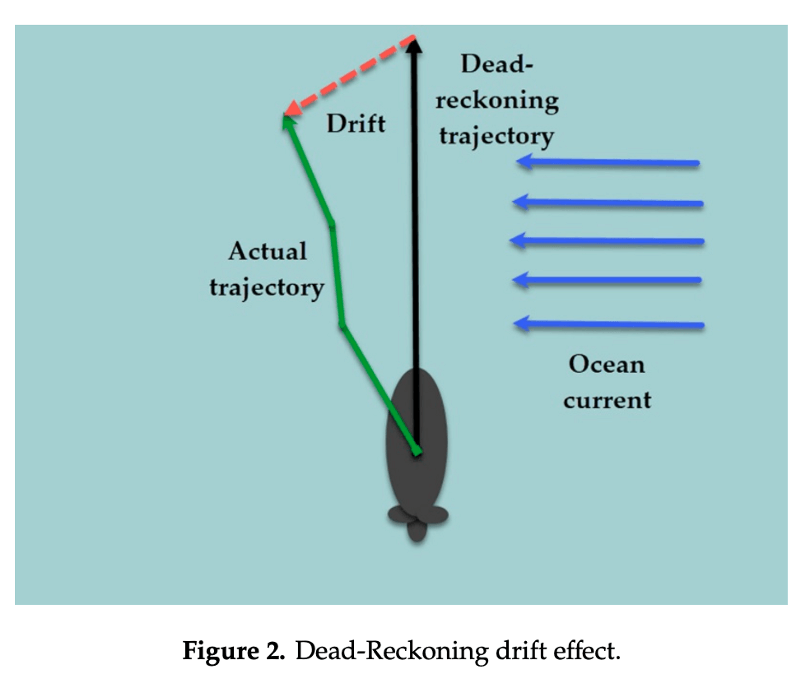
In autonomous vehicles, we can model the dynamics of the system using physical laws and the parameters of the vehicle (weight, size of the wheels, …). Here, we need to take one major factor in consideration: the waves.
A basic version could use a PID controller (I wrote an article about that here ). The concept is similar, we measure an error (actual position vs planned trajectory) and apply steering to follow the trajectory.
Other than the ocean waves, the wind and weight of the boat are important factors. Every boat is different, and every controller is unique.
When building an autonomous boat, we must take that into account.
Conclusion — Opportunities of the field
Who here wants to build an autonomous boat? 👋🏼
If you’re an aspiring self-driving car engineer, you can already realize the potential of your choice. By choosing autonomous technology, you’re choosing a growing field. You are choosing the future.
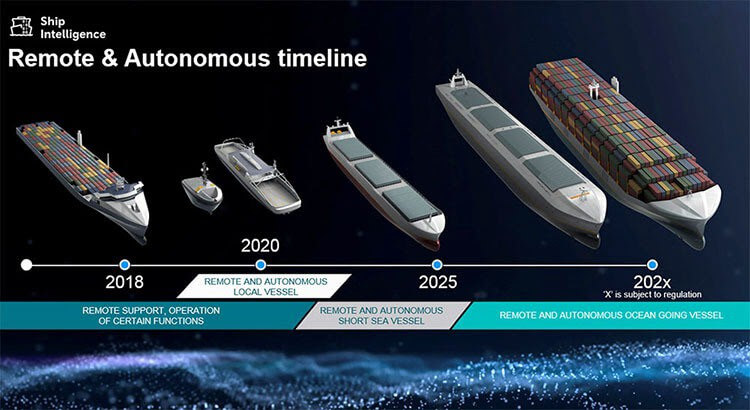
Learn how to build a self-driving car today, you might create the first cruise yacht tomorrow. Today we saw how autonomous boats work, and how they can avoid collisions. Know that a lot of companies are working on the field, Rolls Royce being one of them.
Here’s what they planned.
Boats today use fuel, tomorrow they might finally use electricity.
This is another area where the challenge is strong.
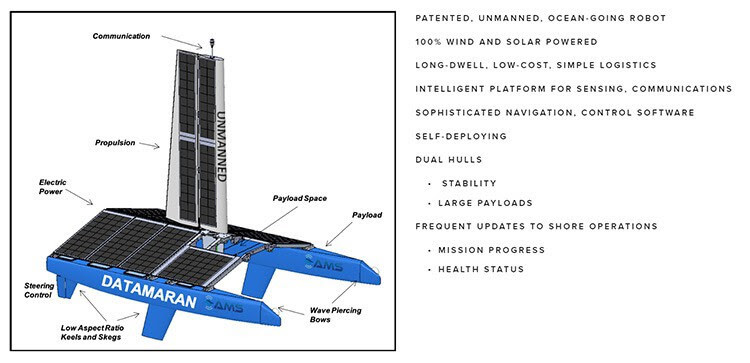
Concepts are emerging from everywhere.
Where is your advantage? The number of companies will grow, but the number of engineers ready to sail at sea is low. The skills are quite similar to self-driving cars, so you can start with something known and that has proven to work.
The sea is the biggest resource on this planet.
You can choose to build an autonomous boat for billionaires, or to create an autonomous ocean cleaner. You can choose to build a racing sailboat, or a military submarine. The possibilities are endless, even more numerous than for autonomous driving.
In Paris, the closest company I have working on this is Sea Bubble. The project is about taking passengers, navigating in the Seine, and reducing traffic. Most vehicles in Paris follow this river to cross the city, so why not take a fastlane?

📩If you’d like to learn more how to build valuable skills in advanced fields such as autonomous vehicle or Computer Vision, I invite you to join the Daily Emails where I’ll teach all of that! I’ll see you there!