Understanding the magnificent FMCW LiDAR
In January 2023, I was in the CES 2023 in Las Vegas, and I met quite a few startups working on LiDAR. I mean, this is an understatement, as the entire West Hall was full of LiDAR companies. Yet, some of them completely stood out, because they were building a new kind of LiDAR called the FMCW LiDAR.
The FMCW LiDAR is said to be a game changer in LiDAR technology, and cutting-edge companies Aeva, Mobileye, or Blickfeld have spent years working on photonic integrated circuits and FMCW sensor to bring a revolution to the autonomous driving world.
So let's begin with a video showing all the kinds of futuristic LiDARs at CES, try to see what an FMCW LiDAR brings!
In this article, we're going to dive in the sensor. Explore its advantages, drawbacks, but more importantly, we'll understand how it works.
So let's begin:
What's a LiDAR? Introduction to Light Detection and Ranging
LiDARs are sensors that send laser beam in a specific direction and return a point cloud, where each point has an XYZ position.
There are many types of LiDAR, and they can be classified according to several criterias:
- The measurement types — how it measures the distance of an object
- The steering beam — the optical components to send the light pulses
- The wavelength — the wavelength of the light beams sent
- The diodes — the type of light sent and received
- etc...
When we classify them through the measurement types, we have:
- Time Of Flight LiDARs
- The AMCW LiDAR (Amplitude Modulated Continuous Wave)
- The FMCW LiDAR (Frequency Modulated Continuous Wave)
In this article, I'm going to talk about the Time of Flight LiDAR (most commonly used), and compare it to the coherent FMCW LiDAR.
From Time-Of-Flight to FMCW LiDAR systems
The Time Of Flight LiDAR is a LiDAR that sends a beam and measure the time it takes to reflect and come back to the receiver. It's what most LiDARs in the autonomous vehicles industry use.
The equation to calculate the range is range = c*𝛕/2. We measure the roundtrip time of the returning light (c = speed of light), and divide by 2 to get the distance of a single trip.
For a while, ToF systems have been the go-to. But they aren't perfect systems. Here are a few reasons why we want to switch to FMCW:
- Indirect Velocity Estimation — We can't measure the velocity directly, we need to compute it by doing the difference between 2 frames
- Weather — They can be confused by bright sunlight, and don't work well under fog, rain, snow, or any bad weather conditions.
- Interferences — If many Tof LiDAR systems are in the same area, the LiDARs can become incapacitated.
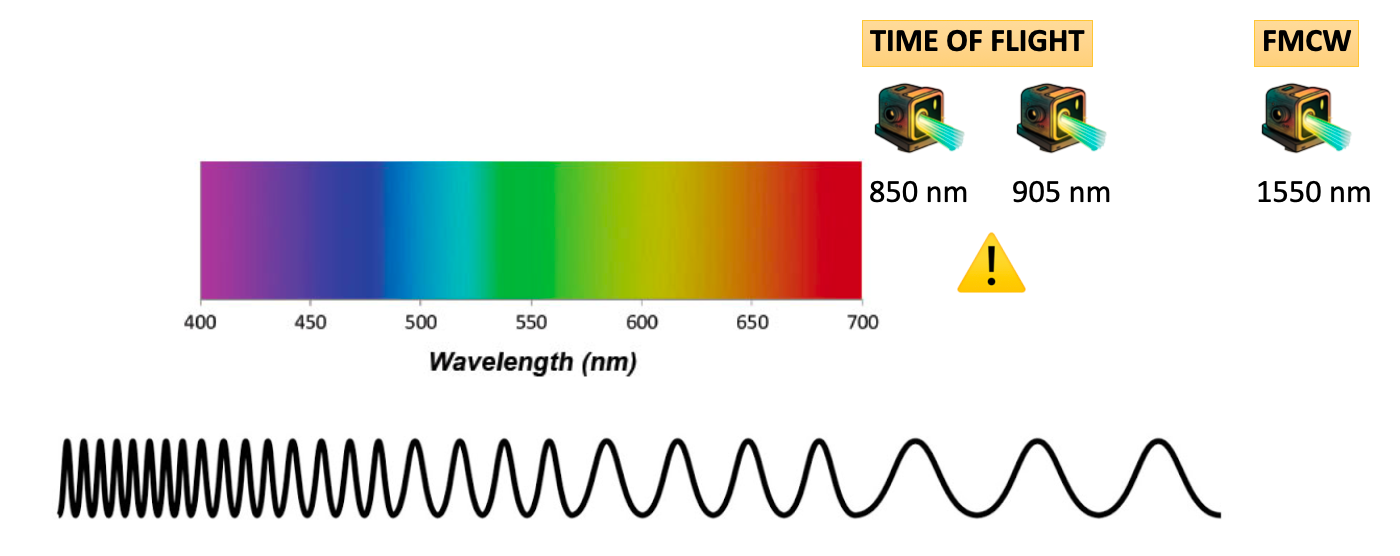
- Wavelength — Tof LiDARs usually use a wavelength around 800-900nm, which is close to the human vision, and can therefore go through the retina and damage the eyes.
Other ways to measure distance are called AMCW and FMCW; and they measure the distance using the wave's amplitude or frequency modulation. The last one is a technique RADARs use known as the Doppler Effect, and we'll talk about it in the next part.

Before moving on, just a note on LiDARs:
In a LiDAR, we often make the distinction between rotating and solid-state (the optical elements are built such that there are no moving parts), or between 2D and 3D. An FMCW LiDAR is often solid-state, but it's mostly a high resolution LiDAR.
So let's now see how FMCW LiDARs solve this:
Enters the FMCW LiDAR (Frequency Modulated Continuous Wave)
A Frequency Modulated Continuous Wave (FMCW) LiDAR is a LiDAR that can also directly measure the speed of an object. These are also named Doppler LiDARs or 4D LiDARs, or chirped LiDARs, because these LiDARs are now using the Doppler Effect calculated using the FMCW chip. FMCW is the technology used in RADARs to directly measure the velocity.
There is a lot to note, but the core idea is that an FMCW LiDAR can do instantaneous velocity measurements. This means it doesn't need to compute the difference between 2 point clouds to get the velocity of a object, it just has it.
An example:
- A LiDAR file is usually with an extension of type .pcd (or .ply, .xyz) and is a set of lines with point coordinates: [X,Y, Z —— X, Y, Z —— X, Y, Z —— X, Y, Z]
- In an FMCW LiDAR, each line now also has the velocity measurements: it becomes [X, Y, Z, VX, VY, VZ].
Here's a video from Aeva's 4D LiDAR:
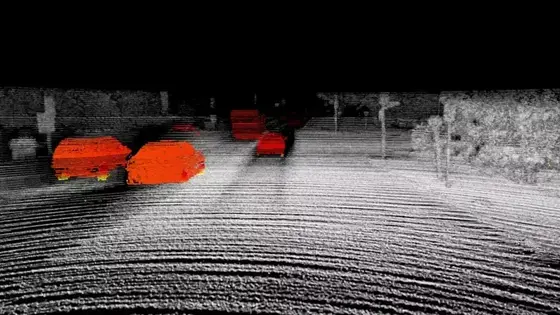
Notice what the FMCW LiDAR systems bring: not only it measures an object's position, but it also adds a 4th dimension. With that, it estimates the exact trajectory of every single point! Which means we have:
Built-In Optical Flow!
This is due to something called the Doppler Effect. If you're familiar with RADARs, you know that the Doppler Effect is what's used there.
How? Introducing the Doppler Effect?
If you take a look at my RADAR article, you'll see this picture used to measure the range of an object using radio waves:
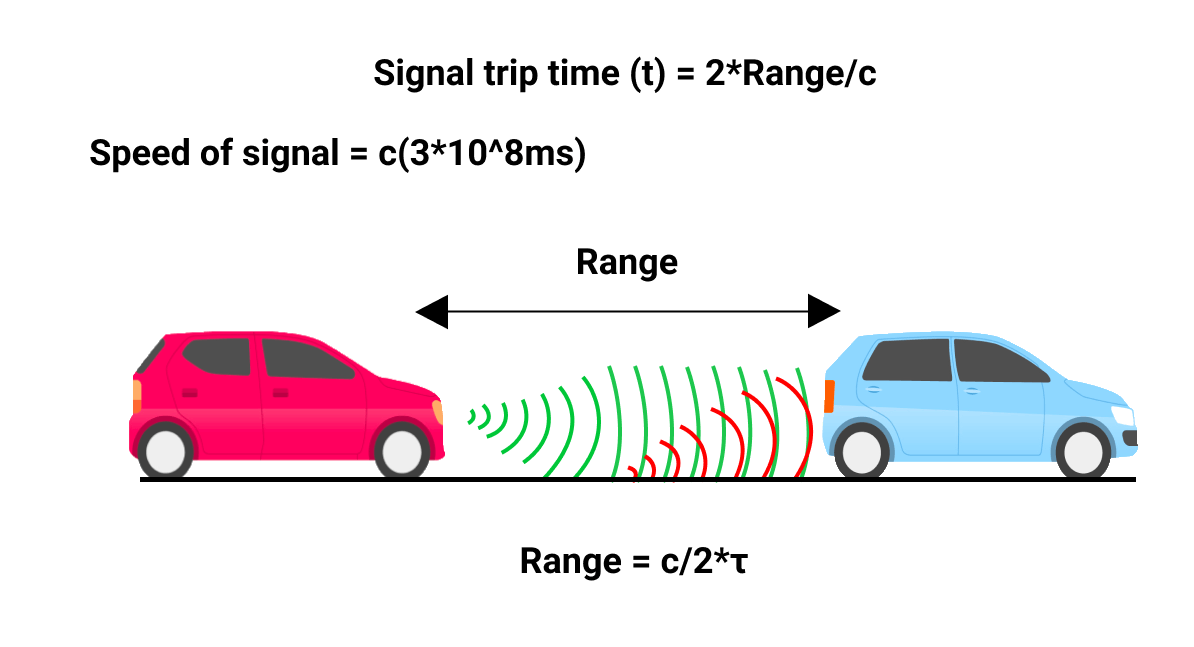
This is how a RADAR works using FMCW — frequency modulated continuous wave. It sends continuous electromagnetic waves at a specific frequency — But when these waves hit an object, they're reflected at a different frequency.
To understand better, here's an image that shows it:
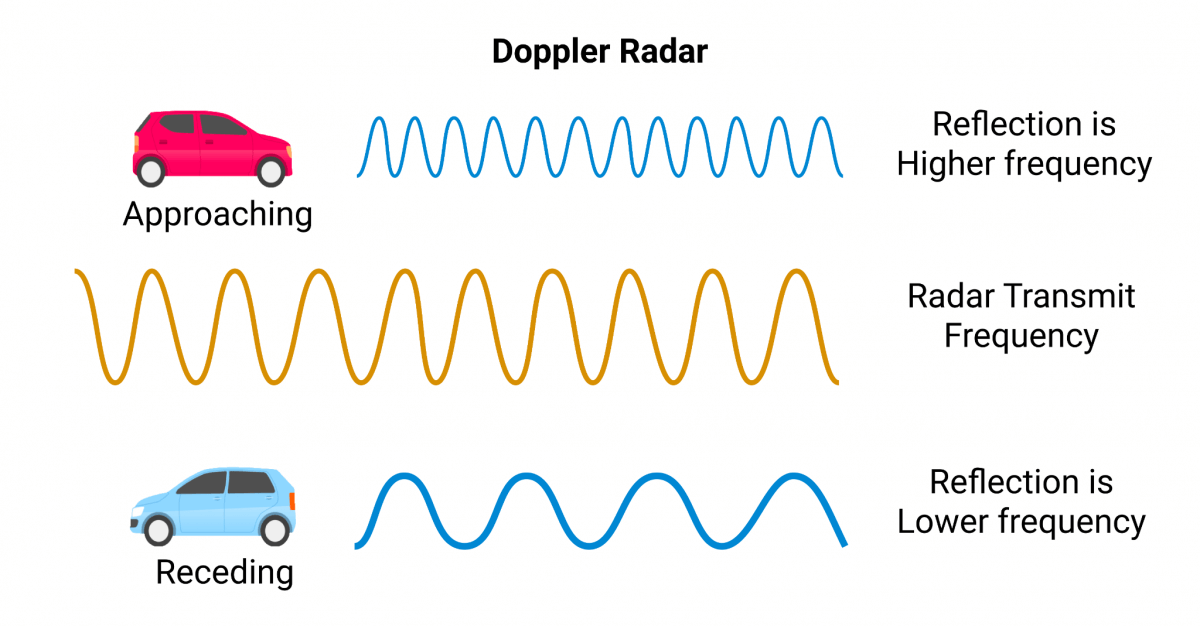
In FMCW, it's all about the frequency of the reflected wave. If the vehicle is moving towards us, the frequency will increase, but if it's going away, it will decrease.
Back to LiDARs:
The FMCW LiDAR, aka Doppler LiDAR, uses exactly this frequency modulation technique to get the velocity information.
The difference is that these LiDARs measure the frequency of the waves while an AMCW LiDAR will measure the amplitude of the light pulses. As a reminder, the frequency is about the wavelength, while the amplitude is about the "height" of the wave.
Technical characteristics
If you remember Aeva's LiDAR, here are a few technical characteristics:
- Dynamic Range: 450 m
- Field of View: 120° by 30°
- Beam Steering: MEMS (Micro-Electro-Mechanical Structures)
- Velocity Accuracy: 1 cm/s on objects moving up to 150 m/s
- Range Resolution: 4 million points/second
Which brings us to the final question:
Which brings us to the final question:
Is an FMCW LiDAR system better than a Time Of Flight LiDAR?
At this point, it's normal to wonder whether the FMCW LiDAR is better than the good old Time Of Flight or not. We know the drawbacks of the Time-Of-Flight LiDAR, but is the FMCW LiDAR the solution?
Let's see:
When they're better
The FMCW LiDAR is usually built with a higher wavelength, we could consider most of them safe for the human eye. With that, they aren't affected by fog, or sunlight, or any of these issues. And finally, they measure the velocity directly, which is super cool!
Yes but:
What are the challenges of FMCW LiDARs?
An FMCW LiDAR is measuring whether an object is going away or towards us — but what about those moving laterally? The Doppler effect doesn't help here, and this is still an indirect computation. So it's not a 6D vector, but a 4D vector (X,Y,Z, V_long).
With that, FMCW technology, even though quite old, is neither a mature nor revolutionary technology — and doesn't perform as well as solid-state LiDARs do today. The components inside are also costly, which means they still have a long way to go before mass production.
FMCW LiDARs are said to be the next generation of LiDARs, but still face challenges. On the other hand, new sensors like Imaging RADARs also compete with them. See my comparison here.