

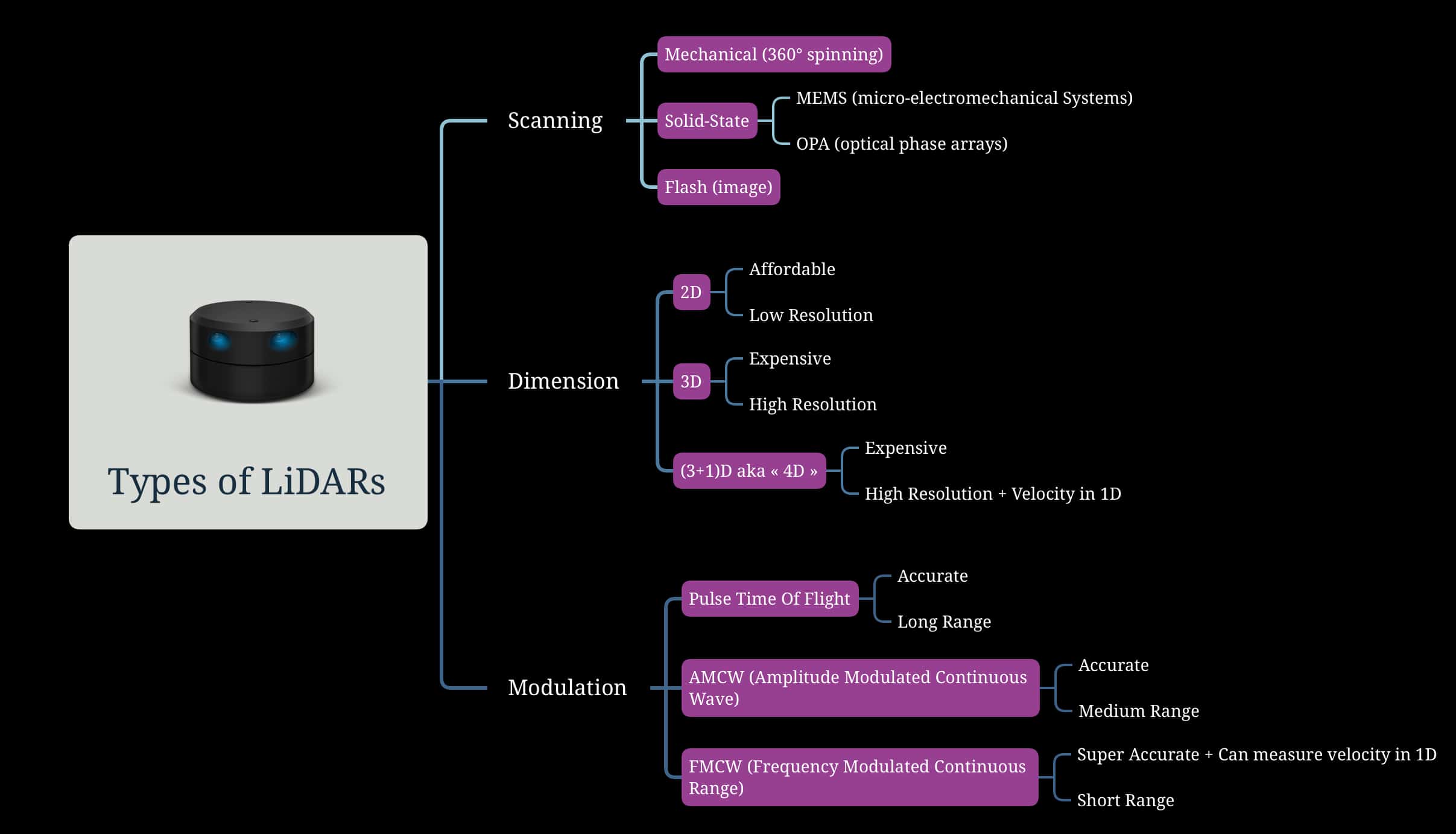
(Mindmap) A Hardcore Look at 9 types of LiDAR systems
In 1969, the world-class comicbook company DC Comics was in the red, on the fence of shutting down. It was so bad that its new corporate master nearly took the drastic, permanent action of shutting it down.
It seemed that after years of battle with Marvel, which involved ideas theft, poached employees, spies, and even price wars, the former 800-pound gorilla of the comicbook industry was losing millions and going nowhere.
In a 2000 interview, you can read this: "Marvel was doing very well. We knew it because DC — independent news — was handling Marvel at the time and their numbers were coming in. Marvel had books like Spider-Man coming in at 70, 80, even 85 percent sales. And we had books coming in at 40, 41, 42 percent. Something was wrong, and [DC's executives] didn't know how to fix it."
So why did DC Comics survive? The answer lies in the rivalry. There is never a single winner, and Marvel and DC being rivals also boosted and helped create an entire industry. Along the years, Marvel and DC conceived this industry, through wars, but also collaborations like Spiderman vs Superman, and even price agreements. This rivalry helped DC not only survive, but it forced it to innovate.
When looking at something, it's easy to see it as black and white. But when you look at things from another angle, you start seeing an entire spectrum. Would DC have survived all these years alone if Marvel didn't exist? Watching from this angle, the answer is... probably not.
It's similar with the LiDAR industry. In the recent years, we've seen a lot of talking around Light Detection And Ranging, but it's often been one direction: Solid-State LiDARs are replacing mechanical LiDARs. FMCW LiDAR technology is the future, and replaces the traditional Time Of Flight. LiDAR Point Clouds are processed with Deep Learning, and no longer with traditional approaches.
The reality is much more nuanced, and this is what I'd like to show you in this article. Just like for Marvel and DC, things aren't black or white. There's an entire spectrum, and we'll learn all about it in this article. In particular, you'll learn:
- The different Scanning Methods of LiDAR instruments
- The different Dimensions and resolutions a LiDAR can produce
- The types of Modulation a LiDAR system can use to measures distances
So let's begin:
The LiDAR Types by Scanning Method
There aren't just 3, but I think 3 is a good start. We're going to see:
- Mechanical Scanning (Rotating/Spinning)
- Solid-State (fixed)
- Flash
1) Mechanical Scanning —— Rotating
The most popular and widely adopted LiDAR has been for a long time the Velodyne HDL-64E, that uses a spinning 64-layer laser detector (64 horizontal planes) to cover a vertical angle of 27°. It spins at 360°, at a frequency of 10 to 30 Hz. This LiDAR can see at around 120 m range.
Wait, what?
Let's take it from the beginning. LiDAR technology uses light to measure the world and generate a point cloud. For that, a LiDAR typically has an emitter, that will send a light wave, and a receiver, that will receive the bounced wave.
But how do you get a 360° point cloud? Well, you do that by rotating your emitter super fast, in a 360° way, to get a Point Cloud.

Did you see how fast it's going? The first time I saw this, I was amazed, and even more when you see how it uses this process to produce entire point clouds. We'll come to this in a minute, but if you arrived here and have no clue what a point cloud looks like...???... just go read this first.
You may have noticed, this LiDAR is moving, and this introduces a risk of failure, as well as a higher cost (back in 2017, these types LiDAR systems could be sold at 100k$). With that, they operate at 905 nm, which is good to see at long distances, but has a risk of damaging the human eyes.
Which is why we introduced a solid-state LiDAR systems, with no moving parts.
2) Solid-State lidar systems
In a rotating LiDAR, a laser beam is steered at 360° by a mechanical system. But in a solid-state LiDAR we don't rotate, so we must introduce a different way to cover the entire scene.
The most commons are:
- MEMS (Micro-electromechanical system) — A MEMS based mirror moves to “scan” the environment. This is what the self-driving car industry uses in replacement of rotating LiDARs these days.
- OPA (Optical Phased Array) — The truly solid-state solution; an array is adjusted and deliver light pauses to different directions. This is the least deployed technology, and hasn't been tested in self-driving cars at scale (to my knowledge).
 Jeremy Cohen
Jeremy Cohen
Still, below is an image of the different types we just covered:
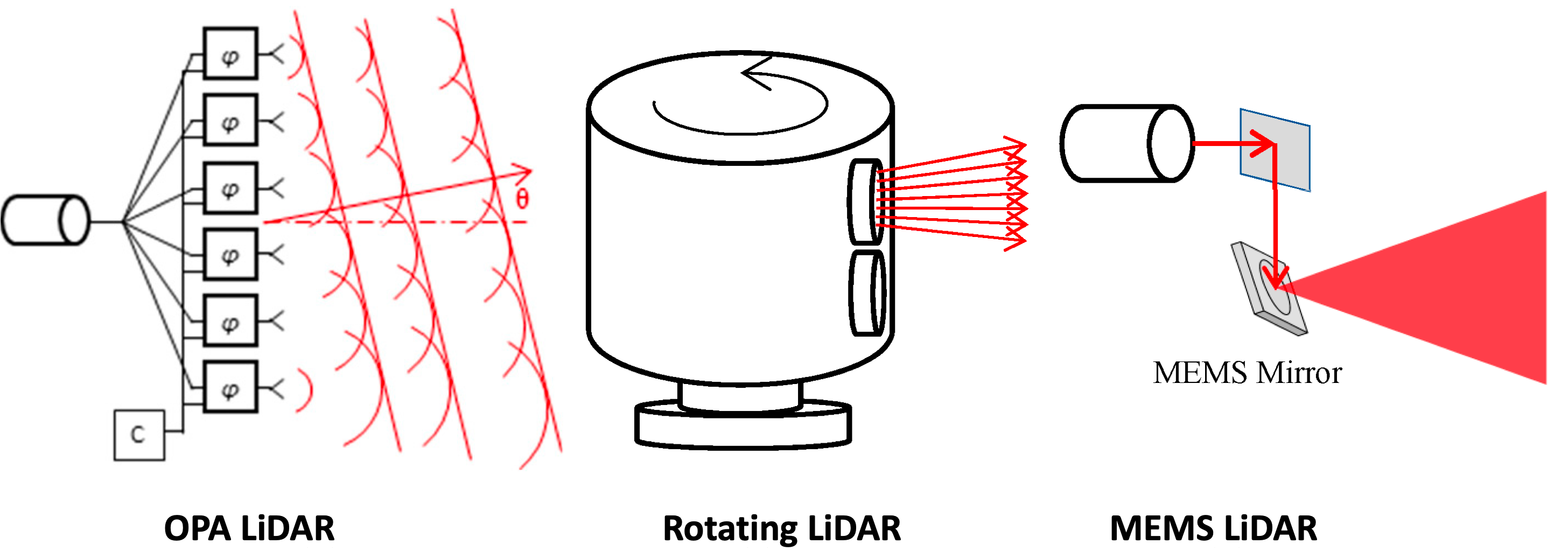
You can find a more hardcore explanation in this article where I found the image, but I think you can already get the main ideas.
- In rotating systems, we have horizontals laser beams, and we rotate around a vertical axis to cover a 360° scene.
- In MEMS (micro-electromechanical systems), we use mirrors to deflect light, and thus cover a bigger angle.
- In Optical Phase Arrays (OPA), we have arrays of closely spaced (around 1µm) optical antennas that radiate light in a broad angular range. By adjusting the "phase" of the light, we can then control the direction of the beam and thus "fake" the rotation.
A Note — While MEMS and OPA offer a solution to the rotating LiDAR, they can't cover a 360° view, which is why you'll often see self-driving cars with several LiDARs mounted on them.
This brings us to the last type of LiDAR, the Flash LiDAR.
3) Flash LiDAR systems
Finally, one of the most interesting types of LiDAR is the Flash LiDAR. In effect, it operates like a flash camera, by expanding a laser beam to illuminate the scene. Unlike a scanning LiDAR, we don't construct the point cloud point by point, nor layers by layers, but by generating the entire 3D point cloud in one flash.
It's basically functioning like a digital camera: the target scene is divided into squares (like pixels), but rather than measuring the light intensity, we measure the time of flight.
Flash LiDARs are solid-state LiDARs, it fits in that category, but it's a non-scanning device (we don't agitate a laser all over the place). The idea is fantastic, but because of the nature of laser, it doesn't really work like a camera. The resolution is (today) very poor, and it doesn't really work at more than 10 meters.
Here is the result of a company named LeddarTech and their product (named Pixell): (source)
The great advantage of flash LiDAR systems is their cost, they could cost around 100$. They can also see through fog, and are the base for many robotics applications.
We've seen the 3 most common types of LiDAR sensors. Most LiDARs will, in a hardware speaking way, belong to one of the 3 families. More exist, like "Detector Arrays" or AMCW cameras, but if we're talking about self-driving car LiDAR system as in self-driving cars, we can mainly see these 3.
Now let's see another way to classify LiDARs:
The Types of LiDAR based on Dimensionality
Here, it's very straightforward. When talking about dimensions, we can do 2D, 3D, and 4D.
Yes — it's that simple. But aren't all LiDARs 3D? We'll quickly explore 2 comparisons:
- 2D vs 3D LiDARs
- 3D vs 4D LiDARs
2D vs 3D LiDARs
In 2021, I was on Amazon, browsing for a LiDAR to purchase, when suddenly, after browsing for long minutes, I found the one. In a minute, I made up my mind to buy it. I smashed my credit card information, and the next day, I received a beautiful rotating RP-LiDAR A1.
Contrary to what you may believe, this LiDAR didn't cost me much. It wasn't 10, 15, or even 20,000$. It just cost me 100$. The RP-LiDAR A1 is one of the most affordable LiDARs on the market, and let me show you the main reason:

This is the output of the LiDAR. And as you may notice, it's very different from the LiDARs you get to see on LinkedIn or Twitter. Not necessarily because they're worse, but because they're 2D.
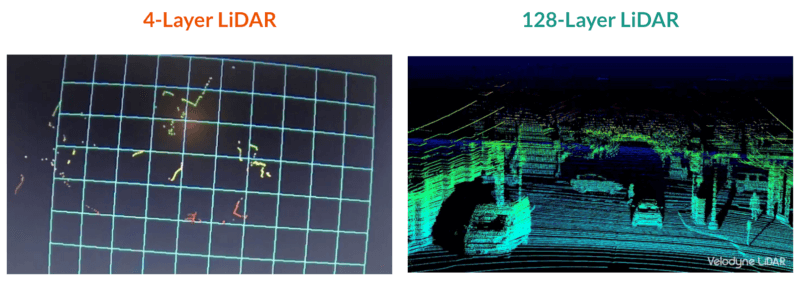
In terms of hardware, the LiDAR is made of an emitter laser diode, and a receiver photodiode; and each color represents a "layer". Hence, a 64 layer LiDAR sends 64 lines of photons.
LiDARs are partly defined by how many vertical laser beam they send. If they send one laser beam, like with this RP-LiDAR, they're 2D sensors. When I started my journey in the world of Perception, I was using IBEO Lux LiDARs, which had 4 laser beams, and that was also considered 2D.
See, for example, the output of it on a real self-driving car visualizer:
On the other hand, when you see LiDARs with 64 or 128 laser beams, or 'layers', you can consider that they're generate sufficient information to appreciate the shape of an object.
So let's now see the difference between 3 and 4D.
3D vs 4D LiDARs
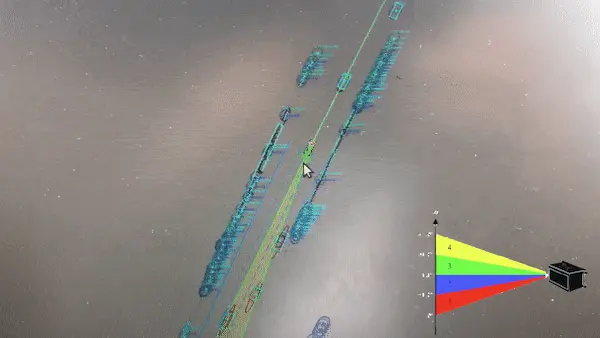
Technically, it would be wrong to call a LiDAR "4D". But recently, we've seen types of LiDARs that could estimate a point cloud, with, for every single point, the radial velocity.
This is often the case for Doppler LiDARs, and this implies that we not only get the 3D (X,Y,Z), but also the 4th dimension: Velocity.
Take, for example, this LiDAR from Aeva, and notice how the red cars are receeding, while the blue cars (on the left lane) are approaching:
So dimensionality was another type.
Now let's see the final way of classifying LiDARs.
The Types of LiDAR based on Modulation Techniques
If you've read terms like "Pulse Time Of Flight", or "FMCW", or "AMCW", it's all going to be here. Here, we're not looking at "how do we generate a point cloud?", nor at "how many layers do we have?", but we're looking at "how do we send waves and use them to measure distances?".
And we have again 3 most common way to do it:
- Time Of Flight
- AMCW — Amplitude Modulated Continuous Wave
- FMCW — Frequency Modulated Continuous Wave
And again, there are others, but these are the 3 most common I want us to see. Starting with:
Time-Of-Flight LiDARs: How to measure ranges with lasers?
What is the distance between the Earth and the Moon? If you google it, you'll find the answer to be 384,400 km. This same question got asked over 2,000 years ago, and already had an answer. But it wasn't until 1969 that humanity had a clear and accurate answer to this question, through an experiment called the Lunar Laser Ranging experiment.
Here's how:
In 1969, the Apollo XI mission, led by Neil Armstrong, deployed a 46-cm square laser retroreflector array containing 100 corner cube reflectors. Okay — they deployed big mirrors on the Moon that could reflect light. And 2 weeks later, when they came back in the US, they sent a laser pulse through a 3-meter telescope, and targeted these reflectors on the moon.
They then realized that by measuring the time it took for the beam to perform the round trip, they could calculate the distance between the Earth and the Moon with an uncertainty of 25 centimeters.
This modern technique to calculating the Lunar Distance is exactly how today's LiDARs work.
In autonomous driving, LiDAR is often listed as one of the main sensors, among cameras, RADARs (radio detection and ranging), and SONARs (sound detection and ranging). While RADARs measure the world by sending radio waves, and sonars sending sound waves, LiDAR do it using light waves.
The main idea of a LiDAR instrument is that it's built to measure distance directly. How? They send a light wave to the world, and measure the time it takes to reflect and come back.
Time-of-Flight (ToF) LiDAR measures the time it takes for a laser pulse to travel to a target and back to the sensor. It calculates the distance based on the round-trip time-of-flight of the laser pulse. ToF LiDAR systems emit short pulses of laser light and measure the time it takes for the reflected light to return to the sensor. This method allows for direct distance measurement.
Here is a simplified illustration to see how it happens:
There is, of course, a formula, which is: distance = time of flight * speed of light/2.
And this formula is enough to accurately measure the distance. When I say accurately, I mean with an accuracy of 1 centimeter, and a range of 200-300 meters.
But there are also more sophisticated LiDARs, for example the AMCW LiDAR:
AMCW LiDAR (Amplitude Modulated Continuous Wave)
While ToF LiDARs were sending pulses and measuring the time it takes to come back, there are other types that, instead of sending pulses, send continuous signals.
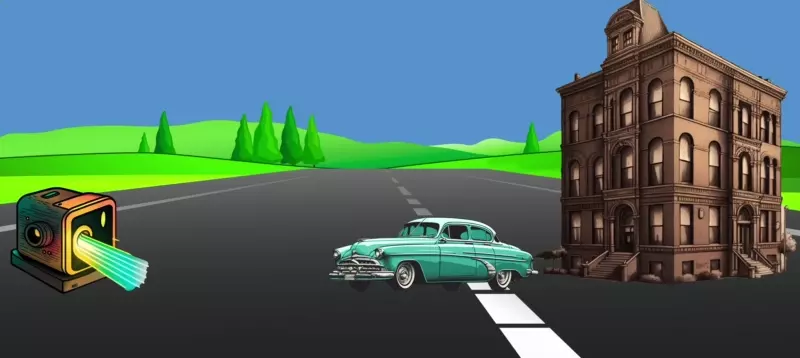
For example, the AMCW LiDAR (Amplitude Modulated Continuous Wave LiDAR) operates using continuous wave laser emission, where the laser signal is modulated with a specific frequency or pattern. By analyzing the modulation of the reflected laser signal, AMCW LiDAR systems can determine the distance to the target. The measurement is based on the phase or frequency shift of the modulation pattern.
Example:
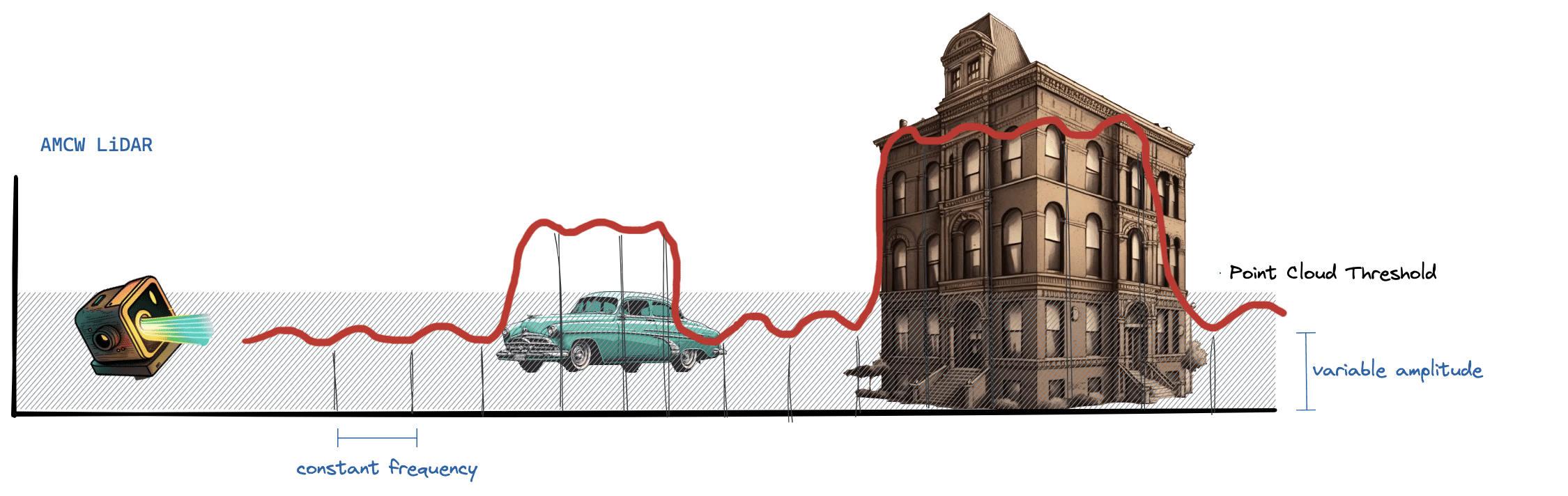
Having a continuous signal, plus measuring the amplitude, could help us go through snow flakes, fog, and other problems common in LiDAR. We'll come back to it, but note how understanding optics can help you solve issues.
The formula to measure the range is here:
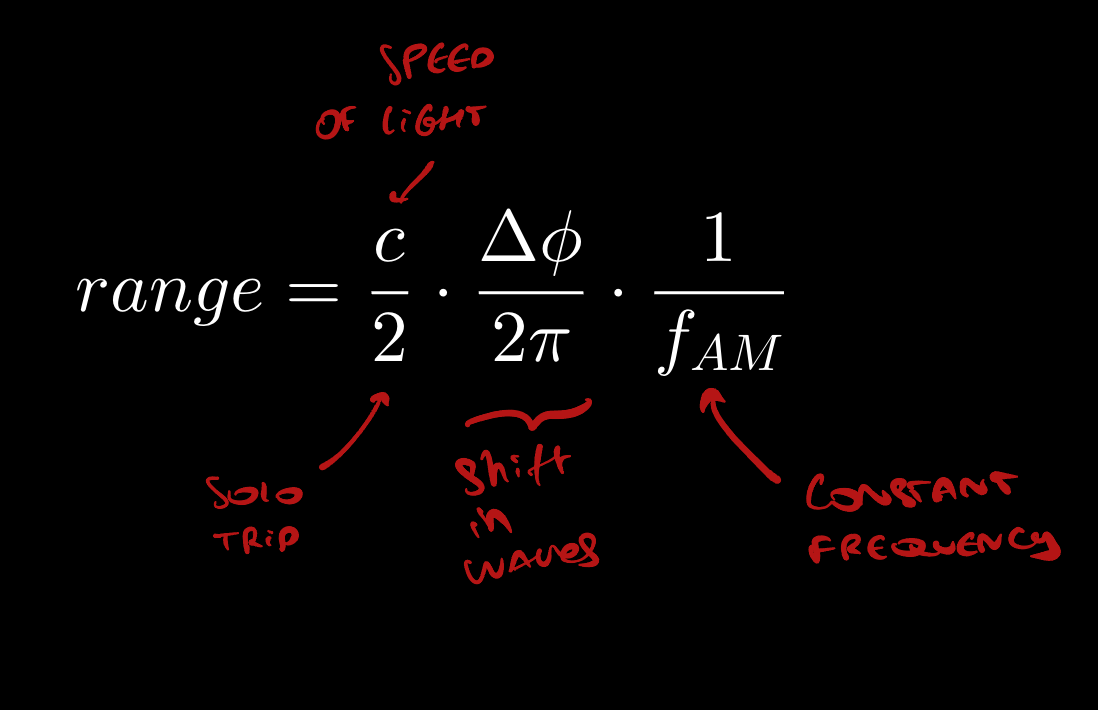
Rather than just c/2*𝛕, we have a complicated equation with Δɸ, π, and even the wave frequency. When we get deeper, we can clearly identify c, the speed of light, and the constant frequency of the wave f.
Finally, let's see another type named:
FMCW LiDAR (Frequency Modulated Continuous Wave)
I have an entire article on FMCW LiDARs (Frequently Modulated Continuous Wave). As a comparison to AMCW LiDAR, we don't modulate the amplitude, but the frequency.
Notice how it's a continuous signal, that has difference between two phases. It also has a formula, but it's a bit more complicated, and so I'll leave it outside of this article. These days, it's said that FMCW LiDARs could replace Time Of Flight LiDARs in the self-driving car space. It''s said that it can even perform 4D Localization without a GPS (Global Positioning System). While these may be true, we're not there yet, and an FMCW LiDAR usually performs at a short range (for now).
So we've done it! We've covered the main types of LiDAR! Yet, there's a question that may get asked:
Is that all? What about topographic, bathymetric, and airborne lidar systems?
We have seen several ways to classify LiDARs. Yet, when browsing for lidar types on Google, I noticed many people wrote about another totally different type of classification...
For example, what kind of LiDAR would we use to map the ocean? Or from a plane or satellite to map a country? The usual automotive LiDARs I describe in this article don't work, and this is mainly because we have types of LiDARs developed just for these use cases.
Mainly, we use topographic and bathymetric LiDARs. Both are mounted on planes or aircrafts, but while a topographic LiDAR (or any of the airborne lidar systems) will map the ground or land, a bathymetric LiDAR will penetrate the water and map below the oceans. You can imagine that, for these cases, we can't use short-range flash LiDARs — and we typically rely on solid-state or rotating.
Output of a Bathymetric LiDAR (source)
Now let's see some examples of LiDAR sensors.
Example: The Ouster that can see through fog...
Let me start this example with a story:
In January 2023, I met with LiDAR startup Ouster at the Consumer Electronics Show (CES) in Las Vegas. At some point, one of their representatives showed me a demo of their work on fog.
"Fog?" I asked. "Your LiDAR sensor can see through fog?"
I had no idea this was a thing, but apparently, "when you understand optics, you can do all sorts of things".
Intrigued, I got my phone out, and started recording...
The Ouster LiDAR Demo (recorded at CES 2023)
What do you notice? The ouster uses a special technique they call "Dual Return", which consists in sending 2 beams, to increase the chances of them passing.
Now some assignment: Go to Ouster's website, check for the "REV-6" product, and answer these 3 questions:
- What is the scanning system?
- What is the dimension? How many layers are there?
- What is the type of modulation?
When wandering there, you will find things like this as well, they have nice illustrations of their features, and even visualizers, SDK, etc...

Summary
Let's now summarize what we learned in this article.
- There are at least 3 ways to classify LiDARs: by scanning, by dimensionality, and by modulation.
- When classifying by scanning — we usually have rotating, solid-state, and flash LiDARs.
- Rotating LiDARs physically spin 360° to generate point clouds.
- Solid-State LiDARs are usually of two types: MEMS and OPA. Most of the self-driving car industry has been using MEMs LiDARs for long, and this starts to change as new types of LiDARs get introduced.
- Flash LiDARs are more recent, short range, and produce an "image" by illuminating the entire scene in one pass.
- Dimensionality classification is more straightforward: 2D, 3D, or 4D. The difference between 2D and 3D lies in the number of horizontal layers, or laser beams — and the difference between 3D and 4D lies in the ability to measure velocities of points.
- Finally, Modulation classification answers the question "how do we measure ranges?" — and this is usually done either using Time-Of-Flight principle (in most cases), AMCW (amplitude modulation), or FMCW (frequency modulation).
So let's see the mindmap summary of the LiDAR Types:
Conclusion: What's the best of all LiDAR Types?
Why do we have so many LiDAR companies out there? And why do all of them claim to be the best at what they do? And even then, why do nearly all of them successfully raise funds, and gets clients?
The answer lies in the spectrum. Just like there isn't one way to see the Marvel vs DC war, there isn't just one way to see the LiDAR ecosystem. Some engineers claim that their LiDAR has a "continuous waveform" (AMCW or FMCW), and thus can see through fog. Others will claim that "Dual Return" will allow this. Others will say it's flash technology.
And the reality? All can be right. LiDAR is a complex sensor, that became a multi-billion dollar industry on its own. You've here accomplished one strong step: understanding the lidar types.
What could be some next steps? I would recommend:
- Read more about LiDARs: If you use the magnifying glass in the header of this website, you will be able to research articles. Try "LiDAR", and see which article triggers your attention. I have some on Sensor Fusion, LiDAR Detection, 4D LiDARs, and more.
- A next step summary of this article would be this research paper a reader from my daily emails sent me.
- Ultimately, I recommend to at some point learn about Point Clouds processing. This is something you can do in one of my courses, like this one.
Ok... Are you about to leave? Well, you shouldn't before I tell you this:




