Waymo vs Tesla: Who is closer to Level 5 Autonomous Driving?
Where do you think humans come from? Growing up, I wrestled with two conflicting ideas about it. One teacher taught me Darwin’s theory of evolution: a gradual process of adaptation, rooted in science but riddled with gaps and errors. The other taught me the Bible’s Old Testament: the story of divine creation, in which even though nothing was ever proven false, this isn't built on any "proof".
Since then, I realized they were trying to answer the same question, but operated in entirely different realms, each with its own logic and purpose. One belonged to science, the other to faith. Making head-to-head comparison was almost meaningless.
And I think this contradiction also exists in self-driving cars, especially when opposing 2 giants: Tesla and Waymo. Both seem to chase the same prize of "Level 5" autonomy, but when you look closer, their paths are so distinct they’re barely comparable.
In this article, we're going to try and understand who has what I call the best "Map to Level 5", we'll take a side-by-side comparison, and I'll give my opinion on 3 aspects:
- The sensor suite
- The algorithms
- The "map", meaning strategy, vision, and more...
Let's begin with the sensors...
Tesla vs Waymo: Who has the best Sensor Suite?
Back when I was studying driverless cars, it was around 2017, when I heard an interview with Sebastian Thrun, godfather of self-driving cars, talking about who was ahead in the race. I vividly remember his words: "Nissan is doing pretty good, but I think the company who is ahead of everyone is actually Tesla".
It was 2017, and I remember feeling surprised by this comment, because at the time, Tesla only had a light ADAS feature working with mobileye, and companies like Waymo, Mercedes, Nissan, and others seemed to be covered everywhere in the media, have "real" self-driving car abilities, and more potential.
What about today? Who is ahead? Closer to remove human drivers? Who has the better vision? The better algorithms? The better sensors? Is it Waymo, or Tesla... or someone else?
In this first part, I want to answer it from a sensor angle. And to do so, I'm going to start by a screenshot of a very popular X (tweet?) from Elon Musk about RADARs, LiDARs, and cameras from August 2025.
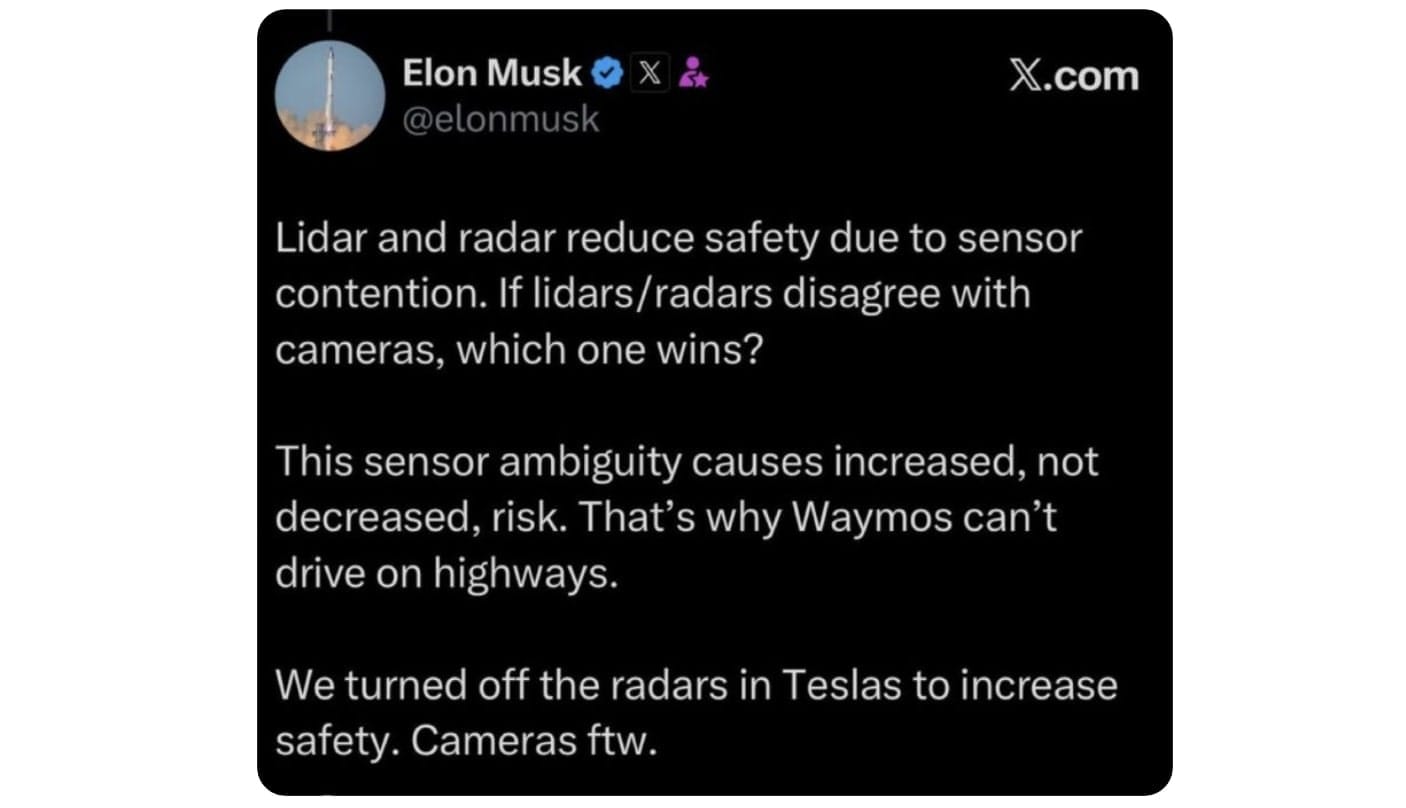
This comment raised an army of furious engineers and fusion experts, mentioning Kalman Filters, and Redundancy, and Sensor Fusion. So before we dive into the exactness of this comment, I would like to describe what each company is doing...
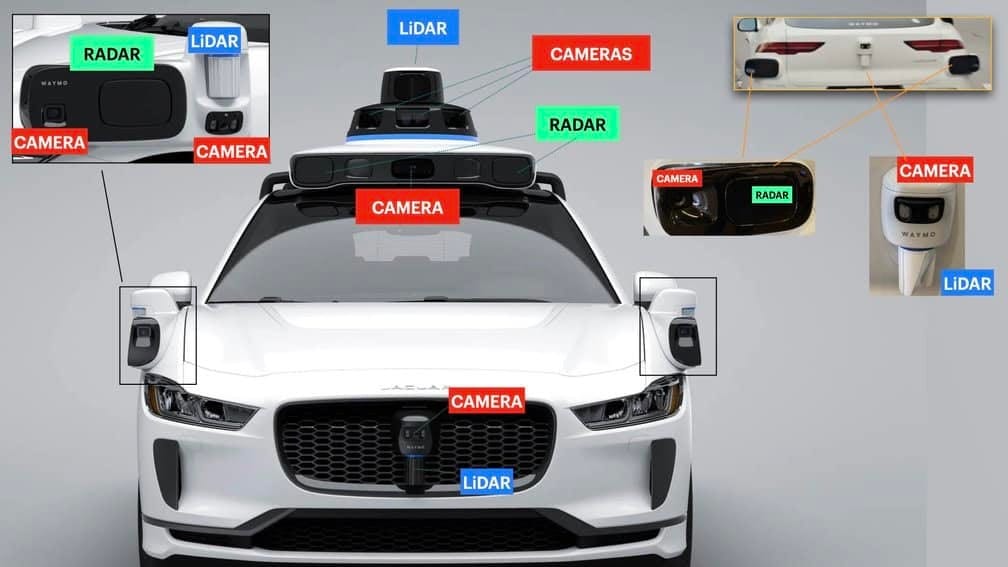
Waymo: 29 Cameras, 6 RADARs, 5 LiDARs
If you look at a Waymo car, you're going to see exactly the opposite of Tesla: tons of sensors all over the place. There are RADAR sensors on the front, side and rear, there's 29 cameras, and 5 LiDARs. The question we can ask is... "Is Waymo trying to kill a fly with a bazooka?".
Just in terms of calibration, it must be an absolute nightmare for engineers. Calibrating a camera with a LiDAR is already a long task, but 29 cameras with 5 LiDARs? Then there is the fusion of all of these sensors together, and this is ONLY the "robotaxi" version, because if you look at their Zeekr shuttles, they also have their own types of sensors, with different generation codes. Their stack is therefore always evolving, and depends on the vehicle they drive on.
What type of LiDAR, Camera, and RADAR is Waymo using?
Let's take a brief look at what each sensor sees:

Waymo uses different types of cameras. They work with high-res long-range cameras (color, telephoto lenses) for object detection far down the road, wide-angle cameras for close-range coverage (pedestrians, cyclists, intersections), and near-infrared cameras for night vision / low-light perception.
Regarding LiDARs, they're using their own sensors called "Laser Bear Honeycomb". There is one forward LiDAR, 2 side LiDARs, and one at the rear. But these are short range, solid-state LiDARs. They are excellent for blind spots and front facing vehicles, but complex to drive on highways because they don't see far. This is why there is the roof LiDAR, which is mechanical, and sees several hundred meters away.
On the animation below, you can see LiDARs both in point clouds format and in range-view — and you can learn about types of LiDARs here.
Regarding RADARs, Waymo uses their own line of Imaging RADARs. Imaging RADARs are what I call 4D RADARs. Unlike normal RADARs who see in 2D and measure the velocity, these ones see in 3D and measure the velocity.
Do you want to see what all of this looks like together? Okay, here it is:
Waymo uses a powerful array of sensors allowing them to see every possible object. We'll come back to the utility of LiDARs and RADARs, but for now, let's look at cameras...
2. Tesla's Sensor Design: 8 Cameras, that's it
Unlike Waymo vehicles, Tesla's approach relies only on cameras. Tesla's autopilot aims to solve autonomous driving using vision-only.
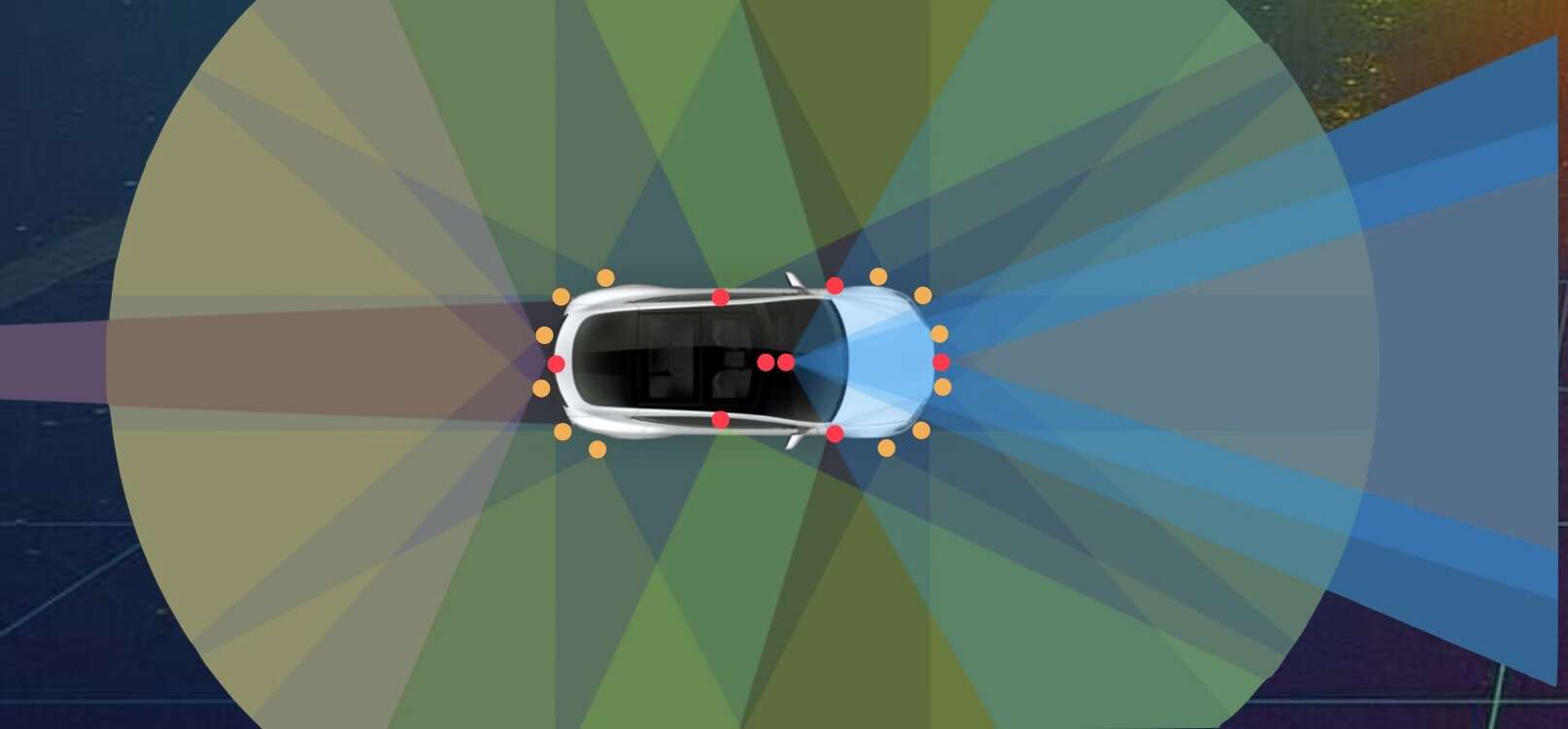
On this illustration, you can see a very simple design that almost never changed. In red, you can count 8 outside cameras, and in orange, you can see 12 ultrasonic sensors used to detect static objects when parking. Among the 8 cameras, there 2 on the windshield, used for stereo vision, one on the front bumper, one on the rear bumper, 2 on the doors, and 2 on the wheels. See the difference? I can't even begin to count Waymo's cameras, but I can easily show you Tesla's sensor stack.
So let's visualize what the cameras see:
Interesting, or not. Now, let's try and understand, who has the best sensor suite?
3. Who has the best sensor suite... Tesla or Waymo?
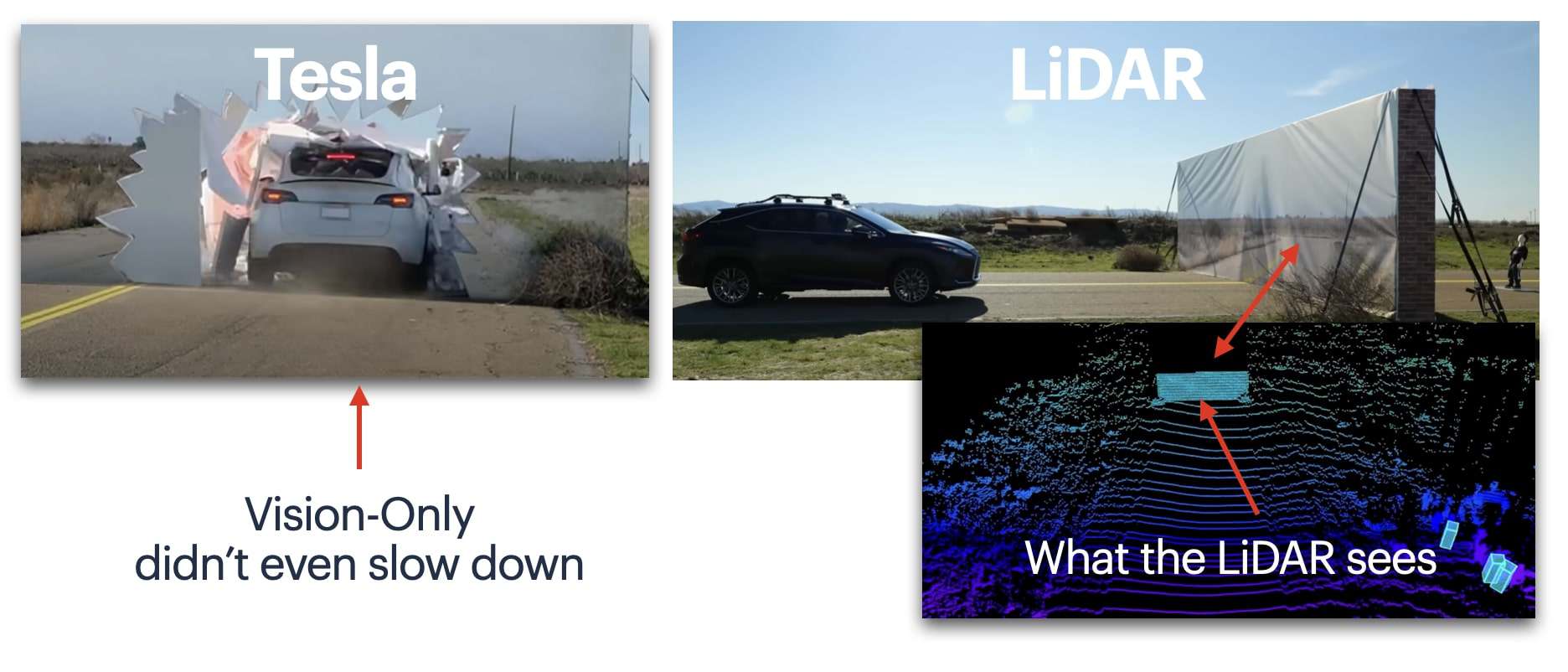
I am going to show you an image, and I would like you to ONLY look at the left part. Ignore the right for now. Can you tell me what you see? You see a car, don't you?
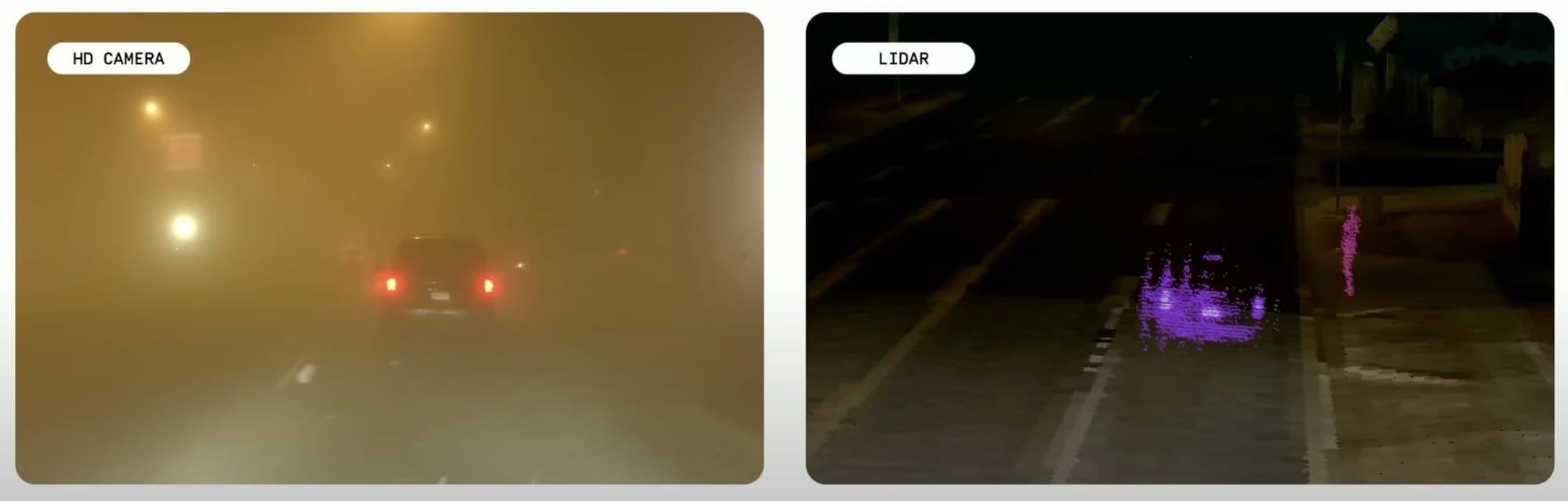
But did you notice the pedestrian? This is one of the limits of the vision-only approach. When you look at Tesla's miles driven without disengagement reports, Tesla FSD clearly shows a limit on bad weather. They don't drive well on cloudy foggy, rainy, or snowy scenes, and they don't drive at all during storm and sleet (when ice falls from the sky).
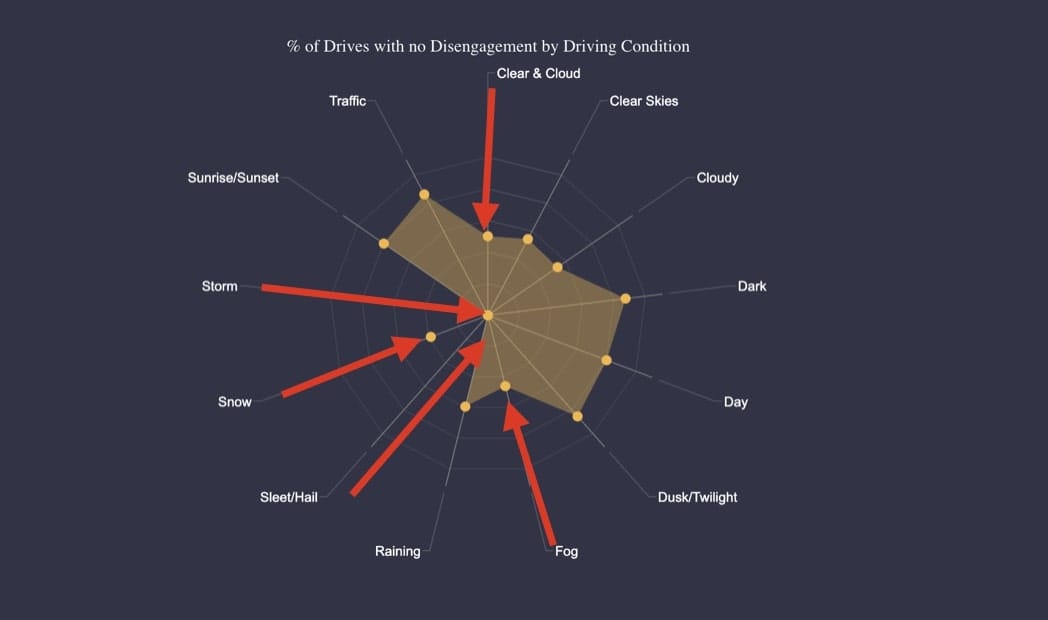
Reports show that FSD13 significantly improved driving by night, but there is still a physical limitation to driving with cameras only that is not solvable with better algorithms. In a robotaxi situation in which you'd sit in the passenger seat, you would be stuck. The way humans drive involves more than cameras, we hear street sound, we sense people, and we don't use wide-angle cameras to detect other cars.
If we were to come back to Elon Musk's comment now, do you remember the "If LiDARs/RADARs disagree with cameras, which one wins???". Waymo shows that redundancy is key to safety. If a camera misses something, your RADAR may not. And with Kalman Filters, you can certainly develop a powerful fusion module to account for disagreements.
When we consider the physical ability of a LiDAR to generate point clouds, you can understand how powerful having them is. Other than seeing through night or other situations, they physically build point clouds. Recently, a YouTube video has shown a Tesla vs LiDAR-equipped car driving on a wall resembling a street. The Tesla FSD crashed on the wall, confusing it with the highway; but the LiDAR-equipped car stopped.
You may wonder... Okay, but we'll never see fake walls in real life, so what's the point? The point is that vision only has its limitations. We've seen Tesla confuse the moon with objects, miss a red light, do phantom breaks, and even miss truck trailers. For all of these reasons, I would say that the Waymo approach including Camera+LiDAR+Imaging RADARs is a better choice. They get the #1 point.
One caveat is that the algorithms, processing power, and energy required to operate this vehicle is insane. LiDAR sensors consume a lot of energy and record a lot of data. Tesla is much cleaner in that perspective.
Speaking of algorithms, let's now move to this second point.
Tesla vs Waymo: Who has the best algorithms?
If we now look at the algorithms, who is closer to build self-driving cars? Tesla and Waymo started off with very different architectures, but now seem to converge towards End-To-End Learning. So let's take a look...
1. Tesla FSD Algorithms: HydraNets, Occupancy Networks, and End-To-End Learning
In my article breakdown on Tesla, I'm doing a full deep dive on the Tesla's algorithm, and how they work; so I won't do that here, but I will still show you the overview of how they built their autonomous vehicle architecture. Note that it's according to the Tesla data; which moved to private in 2023.
You can see 3 main blocks:
- Lane & Object HydraNet: The lane and object Hydranet is a multi-task learning network that takes in the 8 cameras, learns features from each using a CNN, fuses them spatially and temporally via a Vision Transformer, and then outputs several heads. Heads are trained to detect objects, lanes, positions, and so on... You can read more details here.
- Occupancy Network: The Occupancy Network is also processing all 8 cameras spatially and temporally, except that it's trained to leverage spatial data. This is a 3D network that aims to build voxels and assign a free/occupied state to each. You can read more details here.
- Planning & Control: The Planning & Control node used to be (in the drawing) done via a Monte-Carlo Tree Search. This is traditional artificial intelligence. In 2024, they replaced this with a Neural Network planner. While we don't have details on how it works, the "End-To-End" comes from this node moving to Deep Learning, making the entire network differentiable.
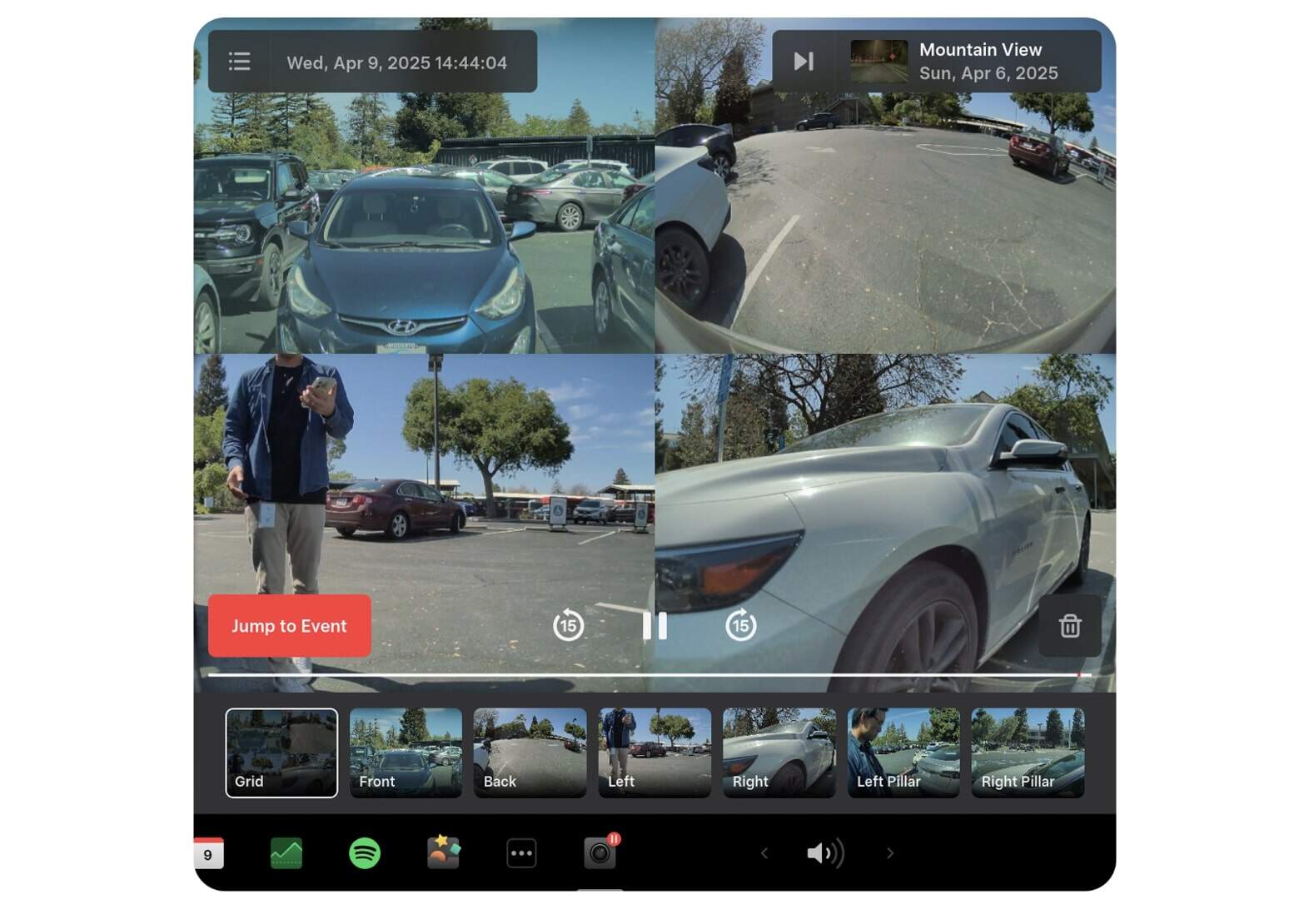
To push the explanation even further, let me show you the typical visualizers on a Tesla, and see how they both refer to an algorithm:

Now, let's see Waymo...
2. Waymo's Algorithms: 3D Deep Learning, Diffusion Planners, and more...
It's a bit harder to fully track the state of Waymo's algorithms, because they continuously release multiple research papers, and we don't know which ones are in production, and which are just pure research. Still, according to my research, there are 3 core pillars Waymo relies on to drive...
- LiDARs
- Prediction/Tracking
- Imitation/End-To-End
LiDARs
Early on, Waymo pioneered work on LiDARs with 3D Object Detection algorithms like SW-Former. These algorithms process LiDAR point clouds and output bounding boxes in 3D. This architecture has been updated a few times, but now serves as the "core" detection algorithm of Waymo. From there, it's encapsulated into other pipelines, like the Late-To-Early Fusion:
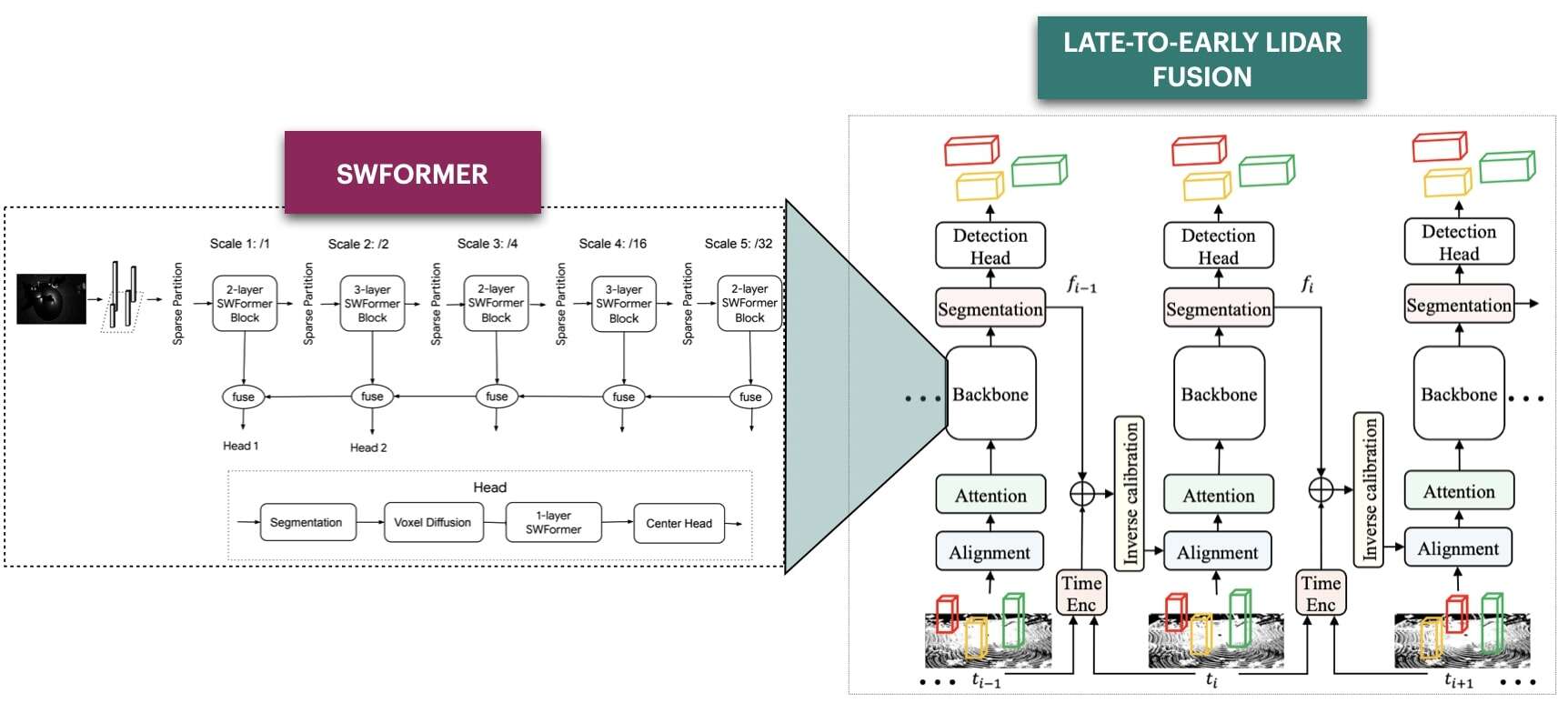
See what's happening? We have a temporal fusion algorithm that processes LiDARs and boxes from t-1, t-2, and so on... and each of these go to SWFormer to output a final head. This is turning SWFormer into a temporal detector, and not just a frame-by-frame detector.
Prediction & Tracking
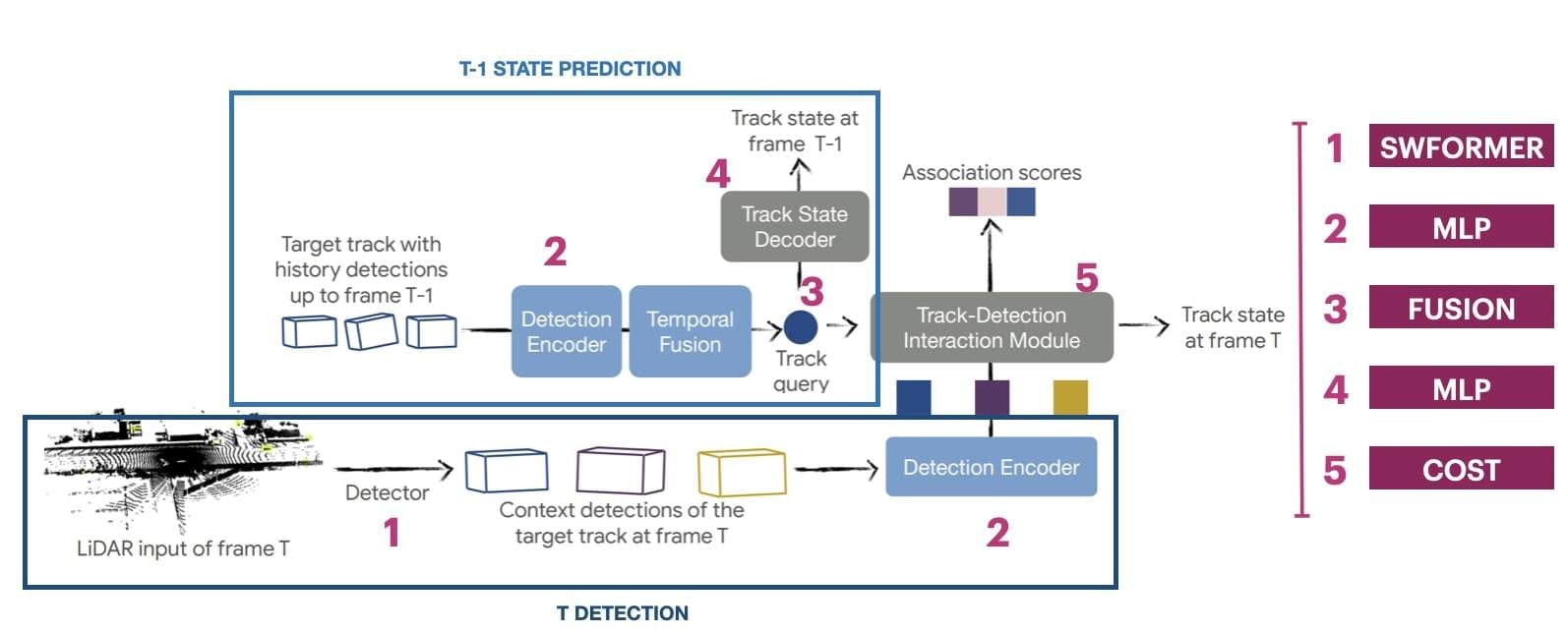
Going even further, we have Prediction & Tracking. Waymo bets big on tracking, and one of the core algorithms I noticed there is an architecture recently released called Stateful Track Transformer which is doing exactly the job of tracking from SWFormer. Over the years, Waymo released TONS of prediction and tracking architectures.
End-To-End/Imitation
Back in the early 2020s, I remember vividly Waymo mentioning an algorithm called ChauffeurNet, who was behaving exactly like Tesla's HydraNet, but was outputting trajectories. Since then, the approach evolved, and the later published papers and public talks mention the End-To-End architecture named EMMA, as well as Vision Language Models.
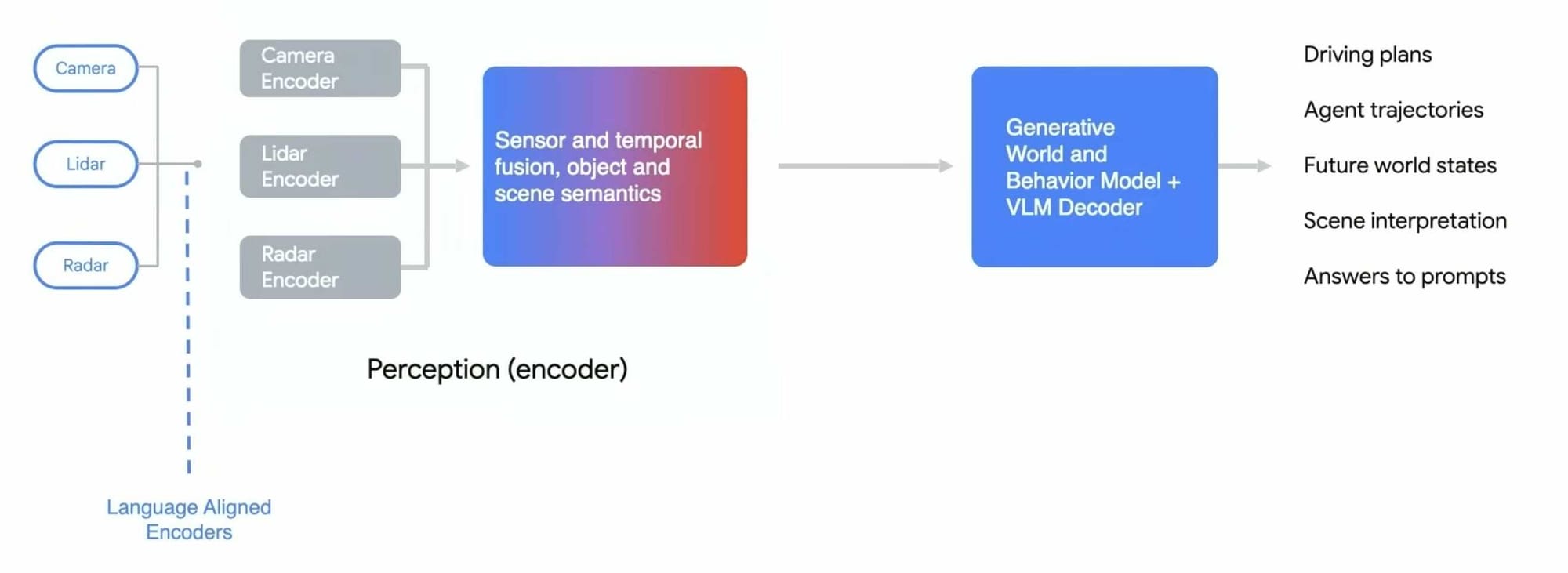
As you can see, this turned in to an Encoder/Decoder architecture, where the encoder learns features from each sensors, then fuses spatially and temporally, to learn a compressed representation of the scenes. Then, the decoder is a generative part, built on VLMs to predict a trajectory.
While many claimed Waymo has a "modular" approach, while Tesla has the advanced End-To-End approach; this is simply no longer the case. Although we don't know whether Waymo uses EMMA in production, or still relies on their traditional pipeline, we definitely know they're heading towards it.
It's reserved to my daily email readers, and if you'd like to join us: You can sign up here for free and get the deep dives.
3. Who has the better algorithms? Waymo or Tesla?
Let me write 4 or 5 bullet points explaining what I think:
- Both Tesla and Waymo seem to be headed towards End-To-End Learning, because the Modular approach has the car behave in a "robotic" fashion. This is not smooth, feels robotic, and rule based. So both go towards End-To-End...
- But to make End-To-End work well, you need LOTS of data. Tesla has that from their fleet of millions of cars all across the world, but Waymo has a small fleet driving only in very specific regions. Scaling via End-To-End will be extremely painful for them.
- On top of that, Tesla only needs to process camera data, which makes the algorithms likely faster, using less power and less time consuming.
- End-To-End's biggest problem is edge cases. Tesla has experience driving several million miles in construction zones, parking lots, or in a new city, and so on... Waymo, on the other hand, is stuck with HD Maps and can have issues moving towards End-To-End...
- Tesla also has advanced techniques for Edge Case Detection and retraining, such as Trigger Classifiers (see my detailed overview here), as well as Dojo and Self-Supervised Learning. They seem far more prepared for End-To-End Learning in my perspective than Waymo. It's as if Tesla had paved the way for this for a decade, while Waymo pivoted last minute
Given these, and under the assumption that the price here is End-To-End, I would give my points to Tesla.
Waymo vs Tesla: Who has the better Map to Level 5?
In this last point, I would like to get off the sensors and technique, and see these as businesses primarily. Their goal is to sell self-driving cars, or autonomous rides, and thus... who's leading in that sense?
1. Strategy
First of all, something very important to understand:
- Tesla sells self-driving cars
- Waymo rents autonomous transportation services
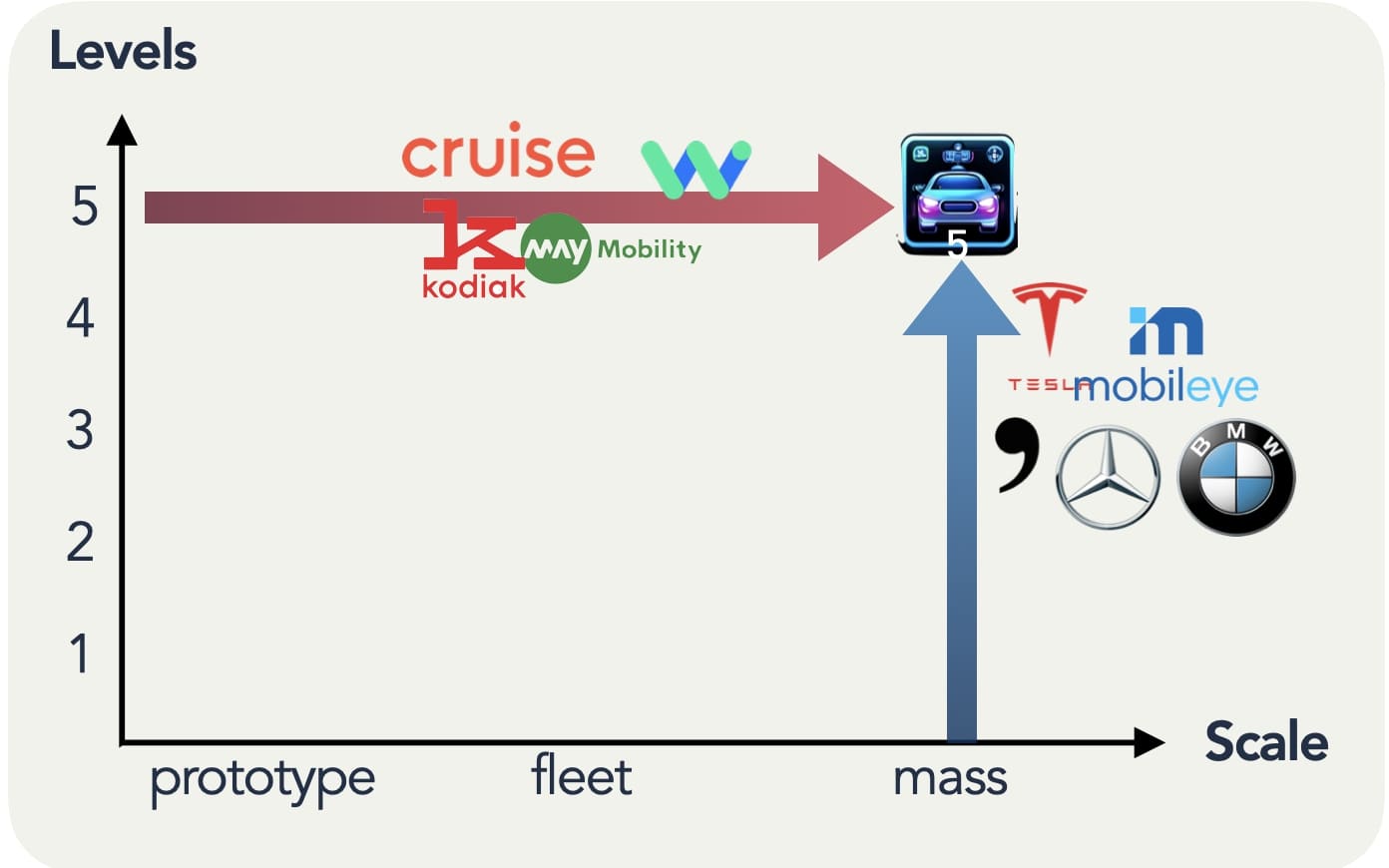
This is essential, because this means their software, sensor stack, philosophies, business models, and even strategies to reach Level 5 are totally opposed. This is very clear when you see the graph below, which shows Waymo starting with a very capable vehicle, but only in ONE geo-fenced area, with ONE car, while Tesla starts with millions of car, but none of them are autonomous. Both don't scale the same thing:
Tesla's goal is to make millions of cars at a 25,000$ price point. Imagine Tesla in 2016, being told to integrate LiDAR technology, which cost over 50k USD/unit. Wouldn't they be better off starting with a light camera + RADAR Level 2, and gradually improving it? Of course they would, if they believe it's possible.
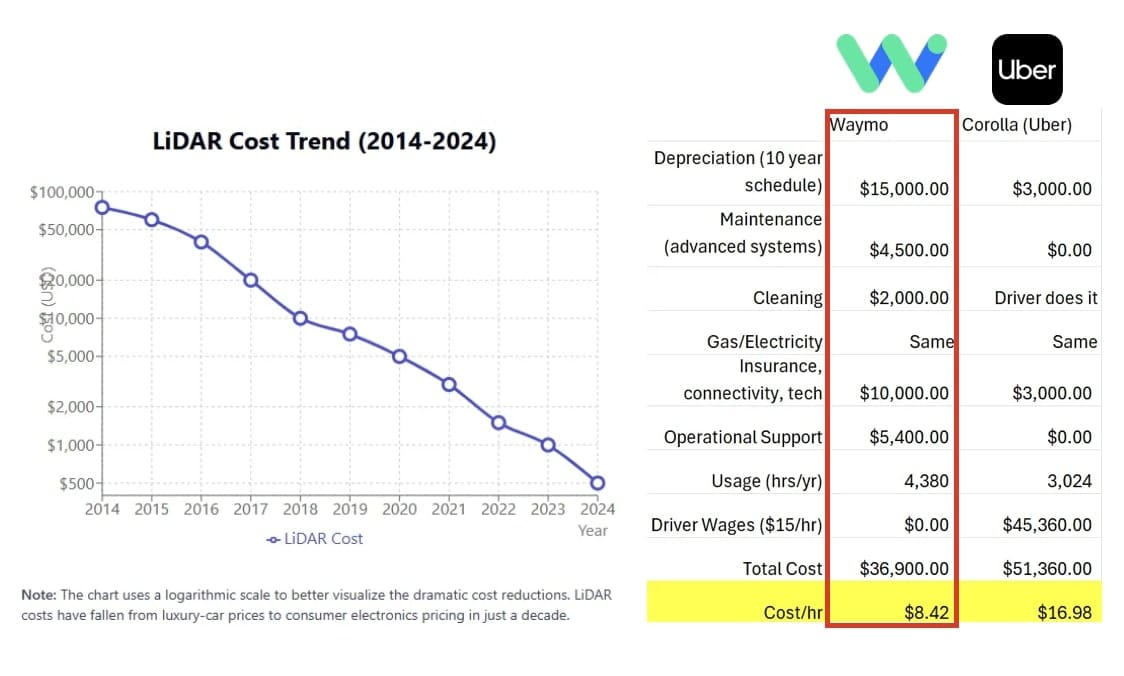
On the other hand, Waymo had a fleet of maybe 20 vehicles at the time. With 29 cameras, 5 RADARs, and 6 LiDARs, a Waymo car costs significantly more than a Tesla car. In fact, each car was estimated to cost around 250,000$ a few years ago. Since then, the LiDAR price dropped, Waymo grew its fleet to over 2,000 cars, and each is now estimated around 150,000$. Can you see how they cost is less and less of a problem to them over time?
Waymo's LiDARs certainly cost a lot, but this cost get absorbed as they do more paid rides, until it 'supposedly' becomes profitable. Supposedly, because there is maintenance, replacement, and growth of the fleet, which can make the cost a never ending fight. Even there, Waymo has more leverage to afford to LiDARs, by raising the ride cost of millions of people from 7$ to maybe 13$ (made up numbers, terribly off — just making a point).
There are great statistics on this blog post from Ben Buchanan that show how Waymo's car get more and more affordable over time. A LiDAR costs 500-1,000$ today, this completely challenges the vision-only philosophy. Unlike Tesla, time in on Waymo's side.
You can therefore understand how each one wins:
- Tesla starts with TONS of disengagements and tries to decreases that number to 0. The more capable the algorithm, the more cars the will sell.
- Waymo starts with very few disengagements and tries to scale the number of rides and regions without increasing this number. The more regions they will cover, the more rides they will sell.
2. HD Maps
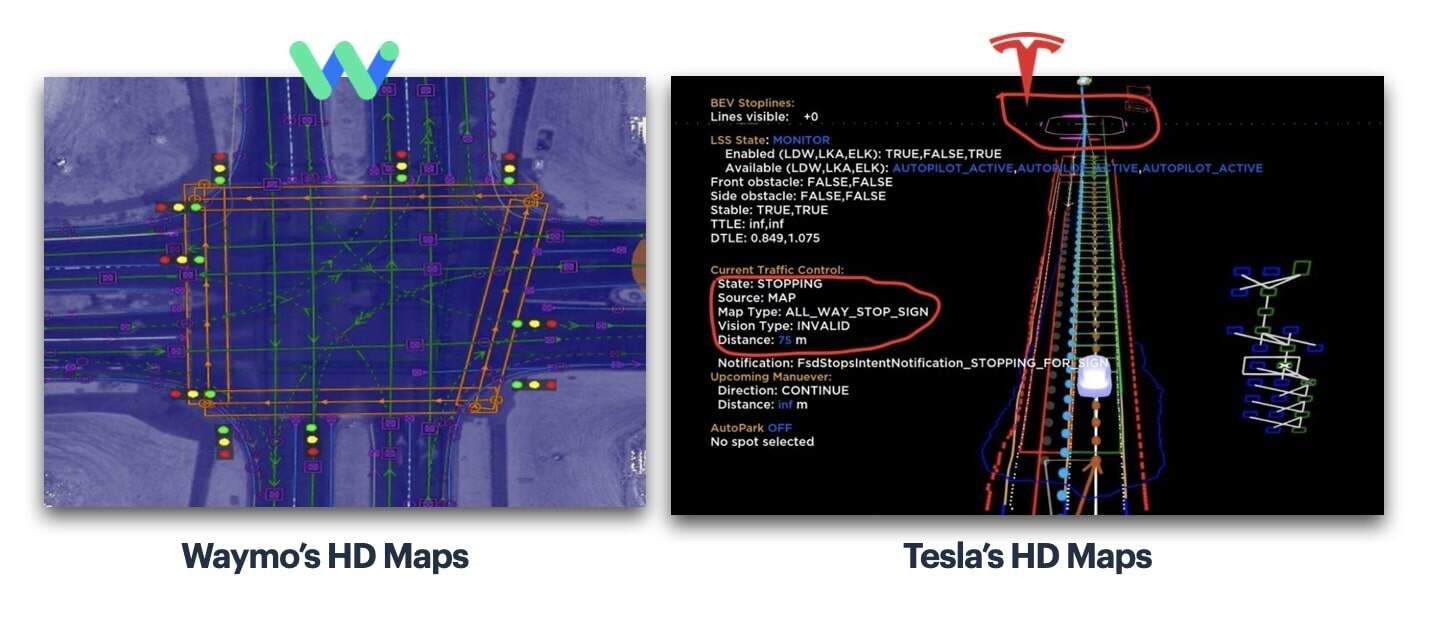
Waymo is betting on a serious "HD Map" strategy that Tesla refused to adopt. According to Tesla, the car should be able to drive anywhere in the US, so there's only using normal Google Maps or OpenStreetMap. It does not mean they don't use HD Maps; they do (see screenshot below), but they don't require them to drive. If the car ends on a parking lot with no map, it should still be able to drive.
On the other hand, Waymo maps every squared inch of every place they drive in. This means every traffic sign, every bumper, every crossroad, every traffic light, every roadwork, lane lines, speed limit... everything is continuously mapped and updated. You can see on the image the HD Maps of Waymo and a screenshot of Tesla's HD Maps on a car in debug.
From what I read, Tesla performs poorly on regions where they don't know the maps. While this doesn't block them, this certainly causes disengagements. They are therefore equal in this sense.
3. Miles Driven & Disengagements
We can't conclude this article without first looking at who slams the brakes the most. Yet, I feel you already know the answer, from the first two points. It's obviously Tesla, because they have many more cars, miles driven (5B for Tesla vs 100M for Waymo), and different situations. So how can we really vote who has the better map to Level 5?
Let's first look at disengagements. What is a disengagement? Is overtaking a stuck vehicle a disengagement? Is accelerating? What is the definition, and do Tesla and Waymo use the same? Well, Waymo uses safety drivers, who obey specific instructions. Tesla drivers disengage for virtually any reason, even if they simply feel like it. This is why Tesla FSD Tracker shows, as of September 25, 24% of FSD drives have a disengagement, and 3% have critical disengagements (US).
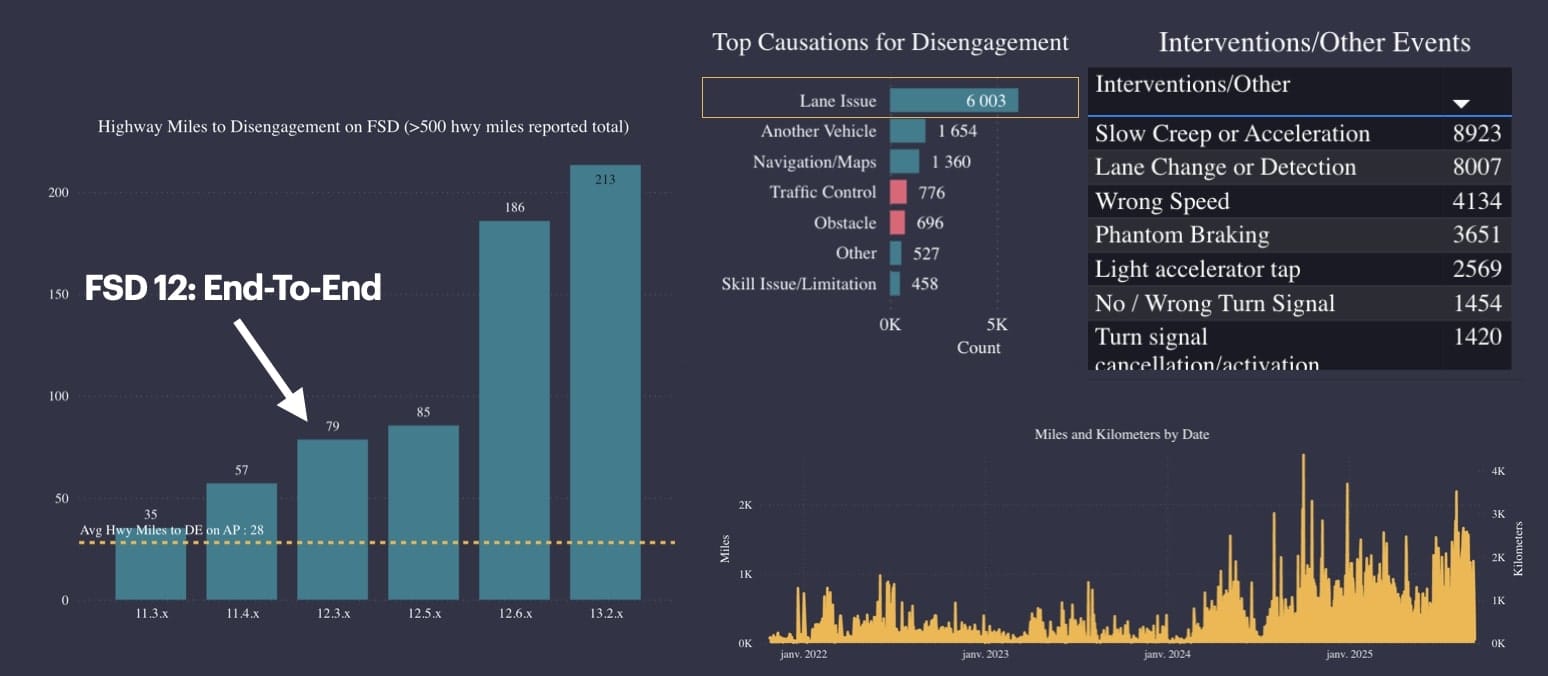
Continuing with more stats: Tesla drives on average 213 miles before a disengagement on a highway, and most disengagements are caused by Lane Issues. Notice the jump in miles driven without a disengagement with FSD 12.6.
For Waymo, it's a different story. Waymo has a driver permit in California, which had them recently release the 2024 disengagement report to California DMV. It clearly showed a number of 9,793 miles driven before disengagement. You may ask... How is Tesla at 200 but Waymo at 9,700 miles driven without disengagement? It's because, as we said, the definition, reason for disengagement, and cities, are extremely different.
If a company wants to drive on a straight line for 500 million miles and show 0 disengagement, they technically can. This is why I think, we can't really trust any of these numbers — only their relative evolution on the same conditions as before 🤷🏻♂️
So who has the better Map to Level 5? I will tell you, but only after we have made a quick summary of what we've seen...
Summary: Who is ahead, Waymo or Tesla?
- Tesla and Waymo both have different sensor stacks. While Waymo relies on a stack of 29 cameras, 6 radars, and 5 LiDARs, Tesla takes a different route and relies on 8 cameras only.
- A sensor setup with LiDARs and RADAR redundancy is safer and gives more reliability than a vision-only setup. LiDARs can detect objects and brake the car even if no object is identified by the camera or an algorithm. Waymo also drives in more weather conditions than Tesla, who is physically limited by the lack of other sensors.
- Waymo uses an architecture based on LiDARs, with algorithms like SW-Former, Prediction/Tracking, and EMMA as an End-To-End system.
- Tesla uses an End-To-End approach involving HydraNets, Occupancy Networks, and Deep Planning. This approach is reinforced by powerful Trigger classifiers, Self-Supervised Learning Dojo, a powerful data fleet — making them win on the algorithm aspect.
- Waymo depends heavily on detailed HD Maps and can only work on these mapped, geo-fenced areas. Tesla’s system is designed to drive anywhere without necessarily relying on HD maps. In practice, they drive much better when they have maps.
- Waymo boasts a much better disengagement rate, with safety drivers rarely needing to take control compared to Tesla’s more frequent interventions; but the conditions they drive in and disengage are 100% under their control.
- The two companies have very different business models: Waymo sells autonomous ride services, Tesla sells cars with self-driving features. As a result, their map to level 5 is not the same.
And now, you're all caught up. So, the Map to Level 5?
The Map to Level 5
Here is what I think:
To reach Level 5, Tesla will need to reduce the number of disengagements. To me, they will have to include LiDARs or RADARs at some point. At today's cost, that would probably be feasible. In fact, I'm pretty sure Tesla is so competent FSD would be solved right now if they didn't chose to play the game on hard more. But now, after all this time, can they really afford to do this? There's ego, brand image, and the "FSD capable" computers they already sold. How can they? Tesla is in the camera game for good.
To reach Level 5, Waymo has to increase the number of areas they drive without increasing the disengagement rate. This means adapting the "HD Map" strategy, which still relies on them, and making algorithms capable to adapt to a new region faster. To make autonomous driving a reality for the entire world, Waymo will need to go faster. Their autonomous vehicles surely are capable, but their current scaling strategy takes too long.